Designing a wearable robotic device to apply forces and measure responses in the human arm
Item 1
van
1
When we use our arms to perform everyday tasks like brushing our hair or taking something out of a cupboard, we do it automatically, never considering the many adjustments and reorientations our muscles need to make. Only when we try to design robots that perform these same tasks, do we start to appreciate the difficulties involved. How our own muscles perform such reach and grab movements may teach us a lot yet we have a long way to go in our understanding of how that works as many of our today’s most advanced robots collapse when faced with the relatively simple task of opening a door.
According to Winfred Mugge (BMechE) and Volkert van der Wijk (PME), part of the problem is that we lack the fundamental understanding of the mechanics and control of our muscles – specifically how they respond to applied external forces, or perturbations – so we need to design appropriate equipment. While there are a few types of apparatus that can do this, they are all large and laboratory-based, which makes them difficult to use in everyday situations. “So there is an urgent need for a device that can generate forces on the human limb, in various directions, and outside restrictive lab settings,” say Mugge and Van der Wijk, which was how their Cohesion project began: with the goal of designing a wearable low-mass device that can produce strategically timed perturbations, without interfering with the normal behaviour of the arm.
Complete outside-of-the-box thinking.
Neuromechanics meets dynamic balancing
With a background in neuromechanics, Mugge works with people who have movement disorders such as tremor in Parkinson’s disease “monitoring the progress of the disease and trying to diagnose what’s going on. So we build devices that do that and also supress tremors – that’s how I got into wearable devices.”
Meanwhile Van der Wijk is a specialist in dynamic balancing: “I work on the design of linkages and moving mechanisms which have to be balanced dynamically because if you turn these linkages into robotic systems, they have to be able to move very fast without causing any vibrations, and that’s of course very useful in the micro-systems industry.”
There is an urgent need for a device that can generate forces on the human limb, in various directions, and outside restrictive lab settings.
Winfred Mugge
Researcher
But rather than supressing tremors or reducing vibrations, the aim of this project was to produce a device that did the opposite: produce perturbations. “Perturbations make it possible for us to identify the system that responds to it,” explains Mugge. “In this case the system is the nervous system of the human body, which controls your movements, and you can tell something about the dynamics of this system by the way it responds to these forces.” If you apply a specific force and measure the muscle response and the resulting movement, then that will tell you the weight of the limb and other properties that affect movement.
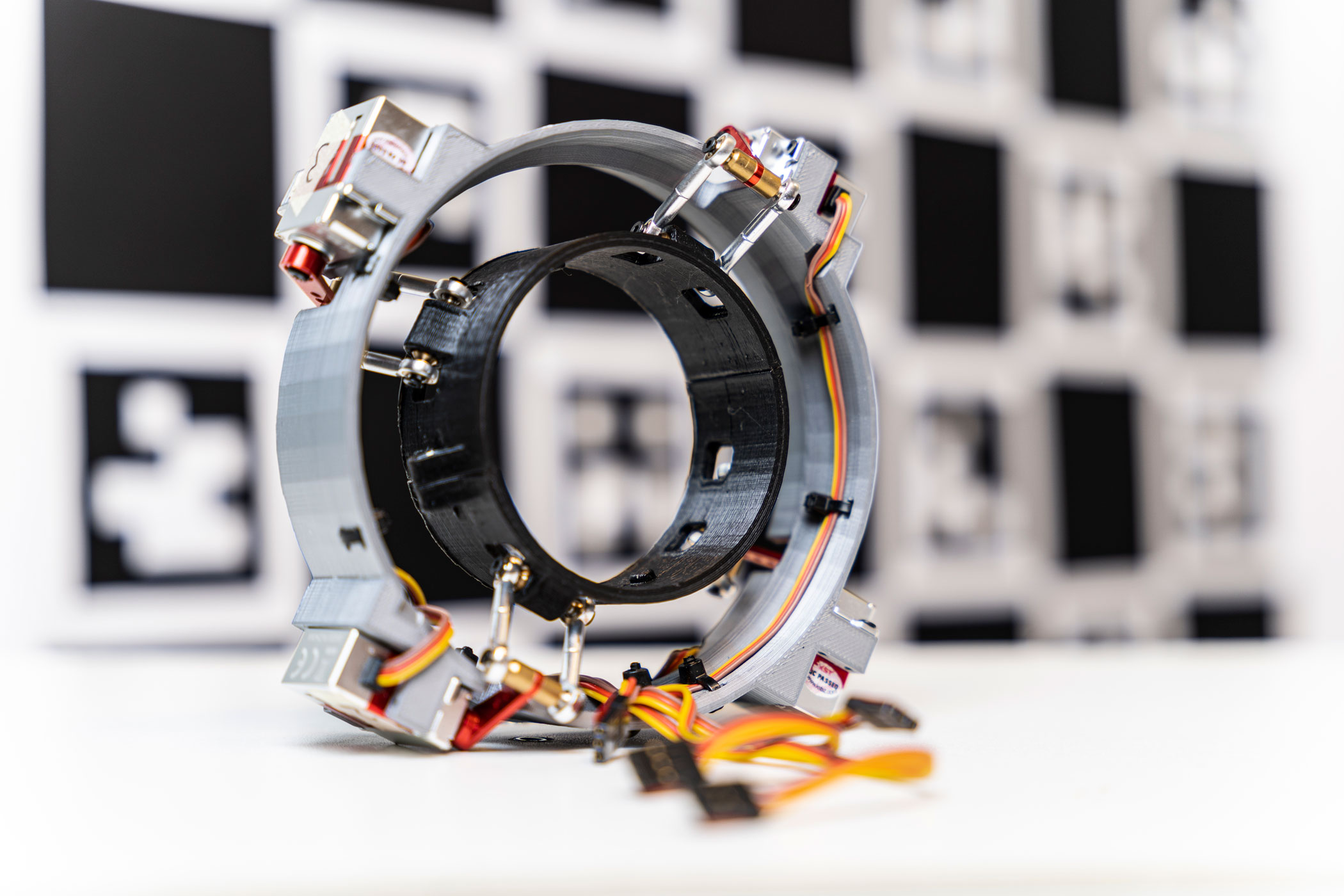
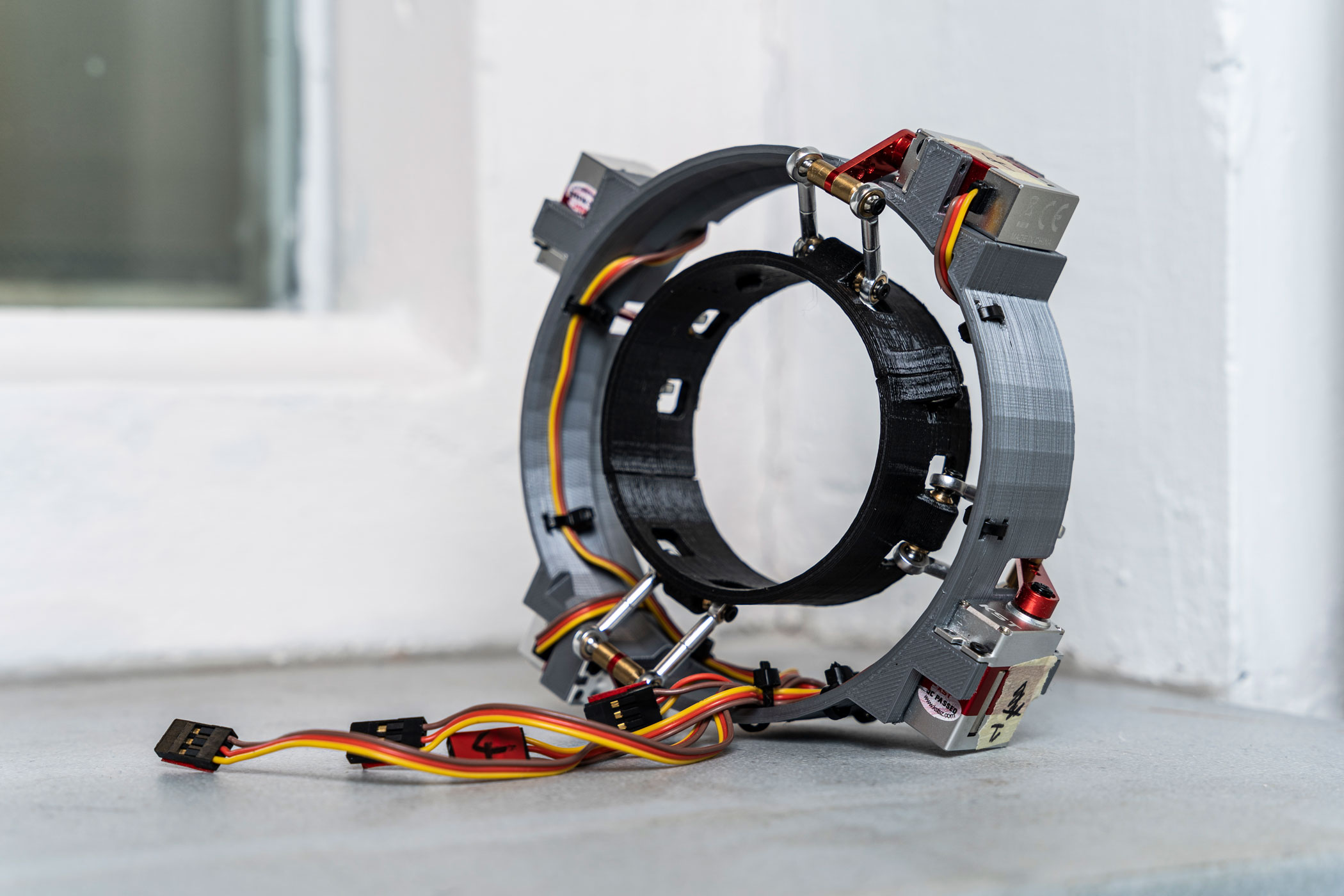
One year into the project, the team’s Master’s student Robbert Koene has built a proof-of-concept prototype consisting of an inner ring that fits around the wrist, and an outer ring connected to the inner ring through four parallel actuated links. “It’s a lightweight device which can apply a very specific force in one of three directions on your arm, along the x, y or z axis,” explains Koene. “So if you apply a pulse of 5 Newtons say for 10 millisecs and you know the displacement of your arm, then you can say something about the degree of stiffness and the damping of your arm - so how everything moves basically, So it’s very useful to have a device that can give very well-specified forces in different directions.”
Outside-of-the-box thinking
So far a prototype has been designed and built. The follow up should incorporate measuring muscle responses, validating the device. Mugge is happy with how the Cohesion project has gone and especially with the resulting device: “For me it was specifically the application which was of interest.”
Van der Wijk has enjoyed the experience too, relishing the chance “to make a 180 degree turn from making a device as balanced as possible to as unbalanced as possible. Then also to use this robotic manipulator around an arm which is also a complete outside-of-the-box thinking.”