
Onderzoeker Jeroen van Oosterhout ontwikkelde een systeem met haptische ondersteuning waarmee het tegelijk aansturen van twee robots beter is uit te voeren. Hij promoveert op dinsdag 1 mei op dit onderwerp aan de TU Delft.
Slaves
‘Normaal gesproken voeren we onderhoud en reparatie direct met de hand uit. Maar in sommige gevallen kan dit niet omdat de plaats in kwestie bijvoorbeeld diep in de zee ligt (voor oliewinning) of nucleair verontreinigd is (bijvoorbeeld bij een toekomstige kernfusie-centrale). Dan gebruiken we tele-manipulatie. Hierin bedient een operator een speciale masterrobot om een slave robot in de taakomgeving te bewegen. Maar de slave robot kan niet zomaar elk gewicht verplaatsen. Te zware onderdelen tillen we met een hijskraan; maar dit vereist voor nauwkeurig plaatsing nog steeds de slave robot. We hebben het dan over coöperatie met twee asymmetrische slaves’, zegt Jeroen van Oosterhout.
Haptic Support in tele-manipulation of asymmetric slaves
Kernfusie
Operators van dit soort systemen moeten door een strenge selectie en trainingen. ‘Desondanks kost het werken met deze twee systemen tot wel 23 keer langer dan direct met de hand. Dat moet verbeterd worden. Het succes van toekomstige kernfusie-centrales hangt bijvoorbeeld grotendeels af van de operationele tijd van die centrales. Een bepalende factor hierin is het onderhoud van die centrales, dat via tele-manipulatie moet worden uitgevoerd. Dit onderhoud is complex. Daarom onderzocht ik de impact van interface-ontwerpkeuzes en haptische ondersteuning (de operator voelt dan een sturende kracht) om de coördinatie tussen twee asymmetrische slaves te verbeteren en daarmee tijdwinst te boeken.’
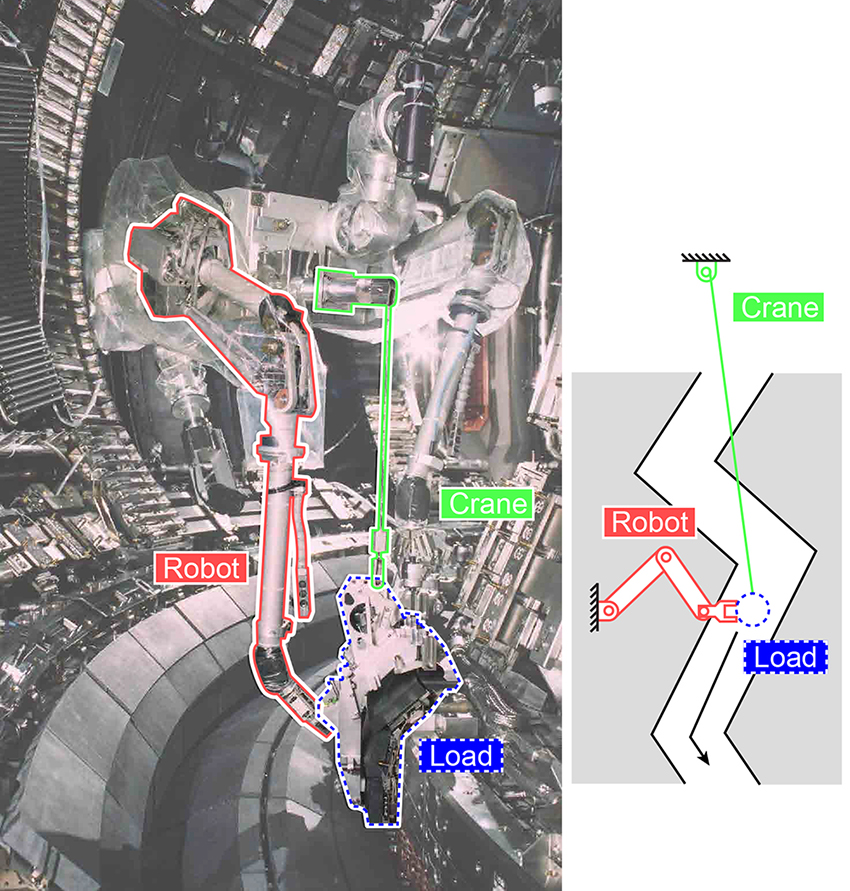
Links toont een slave robot (in rood) en een hijskraan (in groen), die samen met millimeter precisie een zware onderdeel (blouw gestreept) in een kernfusie-centrale plaatsen. De foto is overgenomen van EUROfusion. Rechts toont een abstractie van deze taak.
Varianten
Voor de interface tussen de operator en de slaves bestaan veel oplossingen, maar slechts twee hoofdvarianten: twee coöpererende operators, of één individuele operator. Van haptische ondersteuning is bekend dat dit een individuele operator effectief kan ondersteunen via krachten op de interface. Maar om de informatie te coördineren tussen de twee slaves, moest van Oosterhout een nieuwe haptic assistance controller ontwerpen. Dit nieuwe haptische ondersteuningssysteem helpt operators met de coördinatie over twee asymmetrische telerobots door de interfaces haptisch te koppelen via de taakdefinitie.
Opmerkelijk
De nieuwe haptic assistance blijkt de taakprestatie aanzienlijk te verbeteren, zowel bij twee coöpererende operators als bij één. ‘En opmerkelijk genoeg presteren twee operators zonder ondersteuning aanzienlijk beter dan één operator, maar verdwijnt dit verschil wanneer beide gevallen haptisch ondersteund worden. De haptische ondersteuning stelt één operator dus in staat om de asymmetrische interactieve subtaken net zo goed uit te voeren als de twee operators samen.’
Meer informatie
Promotie J. van Oosterhout: Co-operation and Haptic Assistance for Tele-manipulated Control over Two Asymmetric Slaves.
Link naar proefschrift.
DOI.
Promotor 1: Prof.dr.ir. D.A. Abbink (3mE); Promotor 2: Prof.dr. F.C.T. van der Helm (3mE); Promotor 3: Prof.dr. M.R. Baar (TU Eindhoven).
1 mei 2018, 15:00 uur - Aula, TU Delft
Voorafgaand aan de promotieplechtigheid vindt tussen 9:30-13:30 uur het ‘Mini-symposium on Human-Robot Iteration’ plaats in Commissiekamer 3 van het Aula Congrescentrum TU Delft.
Contact
Jeroen van Oosterhout, J.vanOosterhout@tudelft.nl
Ilona van den Brink, wetenschapsvoorlichter TU Delft, 015 278 4259, I.vandenBrink@tudelft.nl