

Nieuwe vliegende robot imiteert insectenvlucht
Onderzoekers van het Micro Air Vehicle Laboratory (MAVLab) van de TU Delft hebben een vliegende robot ontwikkeld die is geïnspireerd op insecten. De robot werd voor het eerst gepresenteerd in Science (14 september 2018). In samenwerking met Wageningen University & Research is een reeks experimenten met deze autonome en zeer wendbare gevleugelde robot uitgevoerd. Daardoor begrijpen we nu beter hoe fruitvliegjes hun razendsnelle ontsnappingsmanoeuvres uitvoeren. De ontwikkeling van deze robot maakt nieuwe onderzoeken naar de vliegbewegingen van insecten mogelijk. Daarnaast zijn er, door de exceptionele vliegeigenschappen van de robot, allerlei nieuwe toepassingen voor drones denkbaar.
Dieren die kunnen vliegen, doen dit door hun vleugels snel op en neer te bewegen. Kleine soorten, zoals insecten, kunnen daardoor dicht bij een bloem zweven maar er ook meteen vandoor gaan bij gevaar. Biologen zijn altijd al gefascineerd geweest door vliegende dieren.
Ze bestuderen niet alleen de complexe vleugelbewegingen en aerodynamica, maar ook hun zintuigen en bewegingsapparaat tijdens behendige manoeuvres. Vliegende dieren vormen sinds kort ook een bron van inspiratie voor onderzoekers die zich bezighouden met de ontwikkeling van lichtgewicht drones die wendbaar, zuinig en steeds kleiner zijn.


Extreem wendbare vliegende robot
Onderzoekers van het Micro Air Vehicle Laboratory (MAVLab) van de TU Delft hebben een nieuwe robot ontwikkeld die is geïnspireerd op insecten. Zijn prestaties zijn haast onnavolgbaar en toch is hij vrij eenvoudig te maken. De vleugels van de robot gaan 17 keer per seconde op en neer. Hiermee genereren ze de nodige lift waardoor hij in de lucht kan blijven. Met kleine aanpassingen van de vleugelbewegingen kan de robot worden bestuurd. Het besturingsmechanisme van de robot is net als bij fruitvliegjes zeer effectief. Hij kan daardoor niet alleen zweven en alle richtingen uit vliegen, maar hij is ook nog eens uiterst wendbaar.
“Onze robot heeft een topsnelheid van 25 km/u en kan scherpe manoeuvres uitvoeren, zoals flips van 360 graden, als in een looping of een rolvlucht”, aldus Matěj Karásek, de eerste auteur van het onderzoek en hoofdontwerper van de robot. “Daarnaast is hij, met een spanwijdte van 33 cm en een gewicht van 29 gram, uiterst efficiënt, waardoor hij 5 minuten kan zweven of meer dan een kilometer kan vliegen op een volledig opgeladen batterij.”
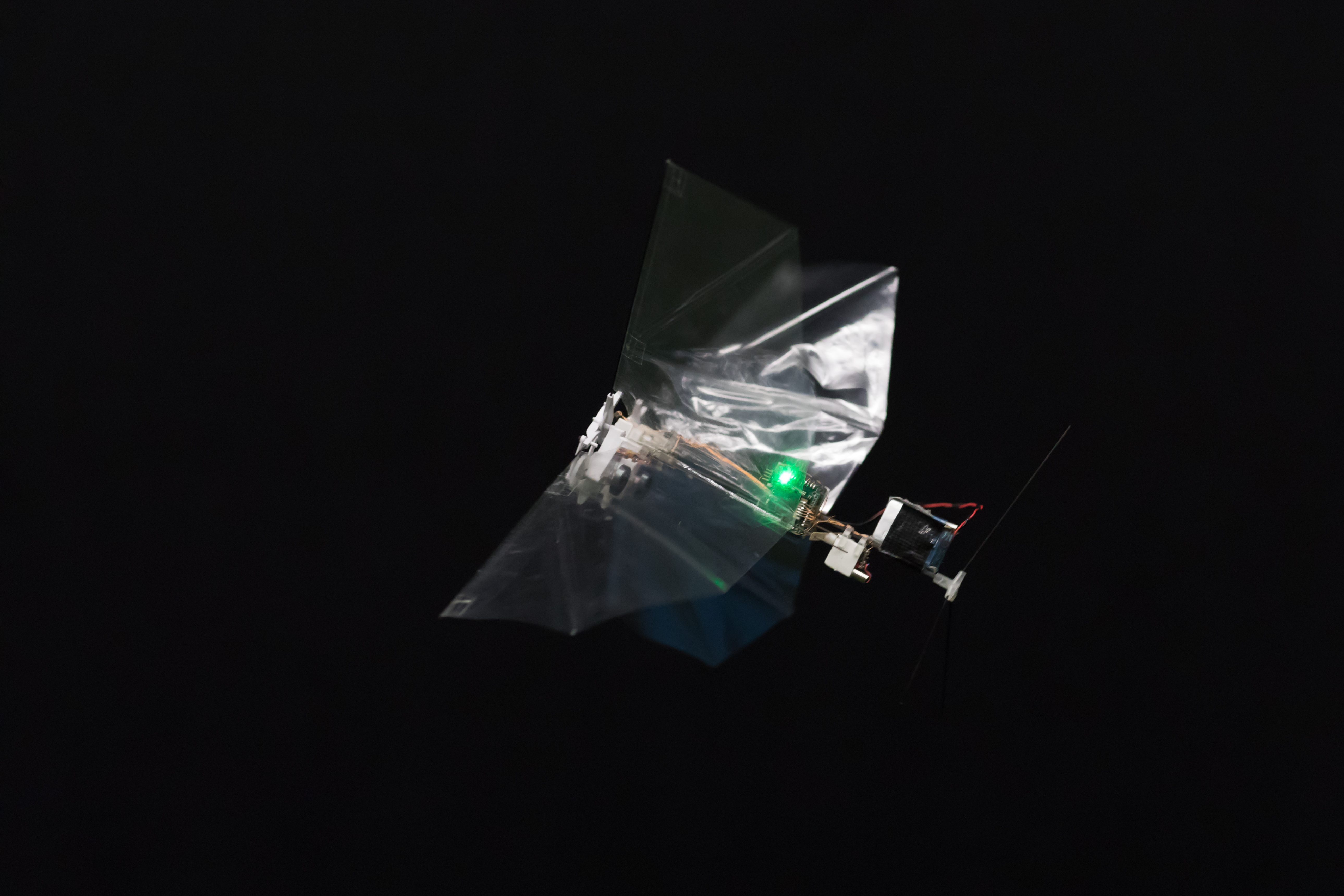
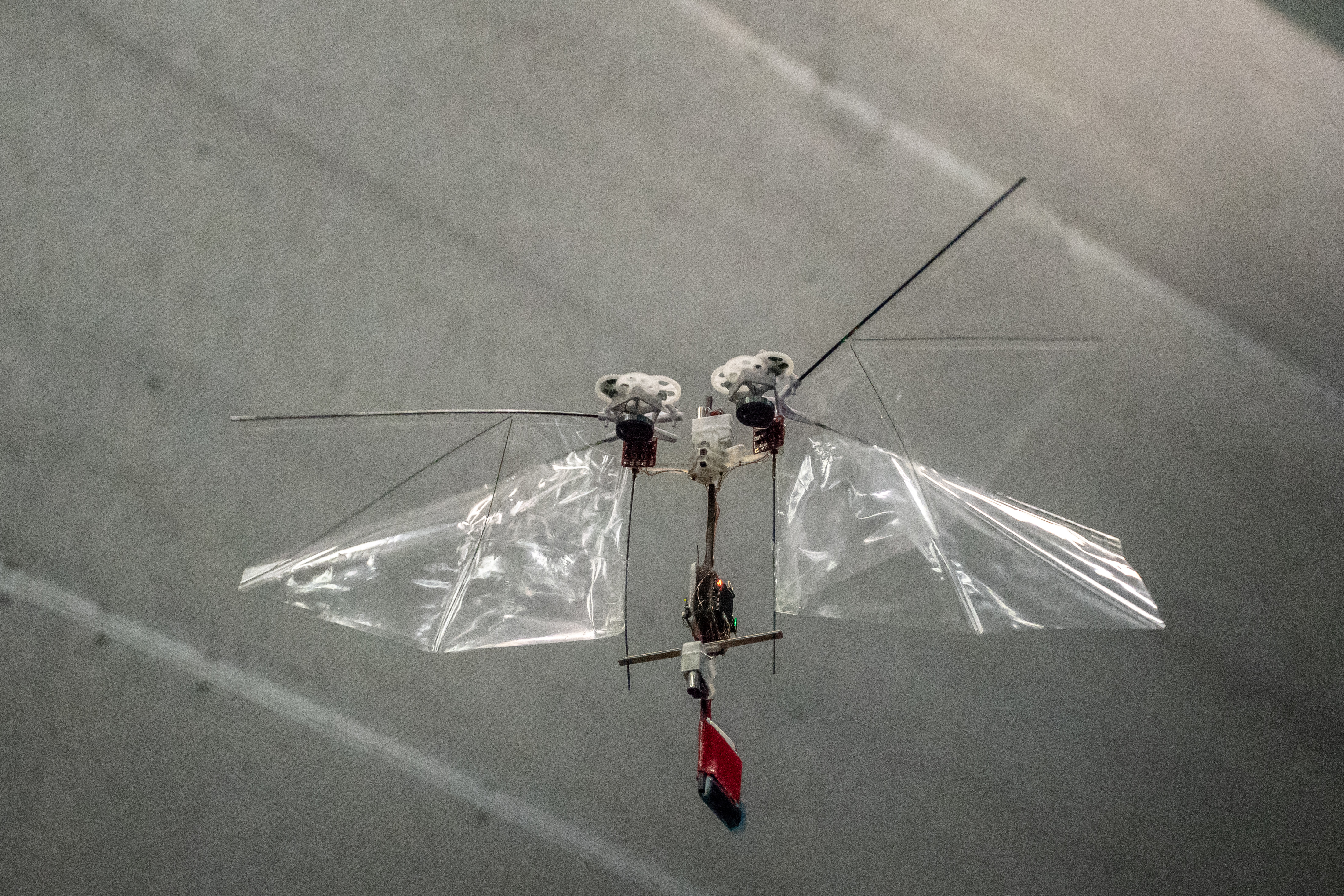
DelFly, in voorwaartse vlucht en zwevend. Foto’s: MAVLab TU Delft

Onderzoek naar ontsnappingsmanoeuvres van fruitvliegjes
De robot is niet alleen een autonome microdrone, maar hij is door zijn vluchteigenschappen en programmeerbaarheid ook zeer geschikt om onderzoek mee uit te voeren naar de insectenvlucht. De TU Delft werkt daarom samen met de universiteit van Wageningen. “Toen ik hem voor het eerst zag vliegen, vond ik al dat het vluchtpatroon leek op dat van insecten. Ik dacht meteen: we kunnen deze robot gebruiken om onderzoek te doen naar de dynamica van de insectenvlucht”, aldus dr. Florian Muijres van de leerstoelgroep Experimentele Zoölogie van Wageningen University & Research. Vanwege zijn eerdere onderzoek naar fruitvliegjes besloot het team om de robot zodanig te programmeren dat het vluchtpatroon lijkt op dat van deze insecten tijdens ontsnappingsmanoeuvres, zoals wanneer je probeert ze dood te meppen.
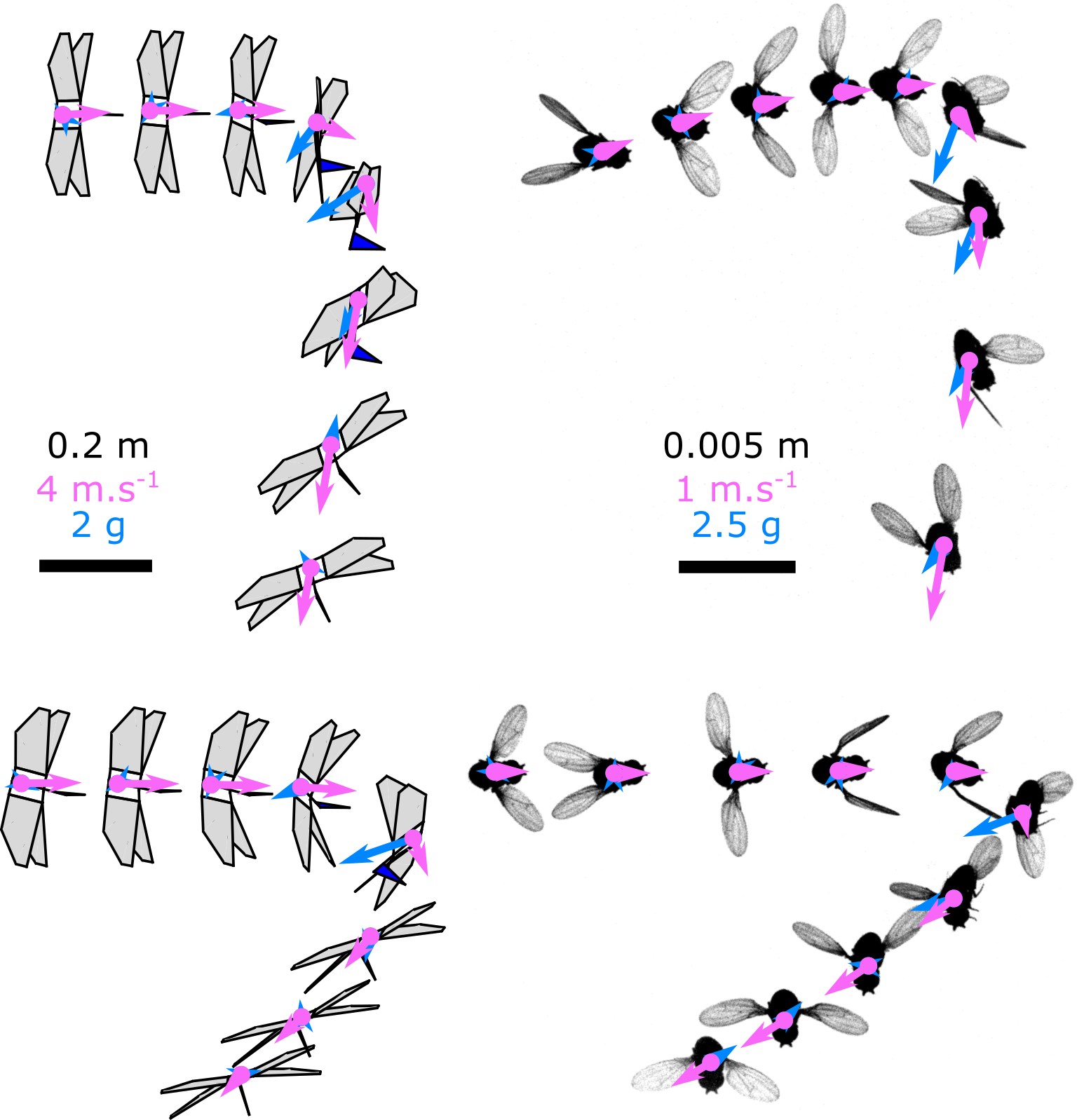
Vergelijking traject robot vs. fruitvlieg, van boven gezien. Beeld: MAVLab TU Delft
De manoeuvres die door de robot werden uitgevoerd, lijken op die van fruitvliegjes. De robot kon zelfs laten zien hoe fruitvliegjes keren en draaien, zodat ze de grootste kans op ontsnapping hebben. “In tegenstelling tot normale experimenten met dieren, hadden wij nu de volledige controle over wat er in het ‘brein van het proefdier’ gebeurde. Zo konden wij een nieuw passief aerodynamisch mechanisme identificeren en beschrijven. Dit mechanisme helpt de vliegjes, maar mogelijk ook andere vliegende dieren, om de controle te bewaren tijdens het maken van haarscherpe bochten”, aldus Karásek.
Mogelijke toekomstige toepassingen
Het MAVLab werkt binnen het DelFly-project al meer dan tien jaar aan de ontwikkeling van vliegende robots die op insecten zijn geïnspireerd. Dr. Guido de Croon, wetenschappelijk leider van het MAVLab, zegt hierover: “Er zijn vele toepassingsgebieden te bedenken voor drones die op insecten zijn geïnspireerd. Ze zijn licht, veilig en een stuk efficiënter dan traditionele drones, met name voor drones met dit soort kleine afmetingen. Tot nu toe hebben deze vliegende robots hun potentieel nog niet volledig benut, omdat ze of niet wendbaar genoeg waren – zoals onze DelFly II – of te moeilijk om te bouwen.” De robot in dit onderzoek, de DelFly Nimble, borduurt voort op bestaande productiemethoden, is samengesteld uit standaardonderdelen en heeft een lange vliegduur, waardoor hij interessant is voor praktische toepassingen.
De DelFly Nimble wordt verder ontwikkeld binnen het TTW-project “To be as nimble as a bee”, een samenwerkingsverband tussen de TU Delft en de universiteit van Wageningen, en gefinancierd door NWO.
Meer informatie
A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns
Matěj Karásek, Florian T. Muijres, Christophe De Wagter, Bart Remes, Guido de Croon
- Science, 14 september 2018
- DOI: 10.1126/science.aat0350
http://science.sciencemag.org/cgi/doi/10.1126/science.aat0350
Foto- en videomateriaal en het volledige artikel zijn beschikbaar via de website van het DelFly-project: http://www.delfly.nl/