
Delftse wetenschappers maken kleinste autonome race-drone ter wereld
Wetenschappers van de TU Delft hebben de kleinste autonome race-drone ter wereld gemaakt. De grootste uitdaging bij het maken van de drone zat in het gebruik van slechts één kleine camera en in de zeer beperkte hoeveelheid gegevensverwerking. De belangrijkste innovatie is het ontwerp van robuuste maar uiterst efficiënte algoritmen voor bewegingsvoorspelling en computervisie.

Autonome drone-races
Drone-racen met menselijke piloten is een belangrijke e-sport aan het worden. De volgende stap is autonoom drone-racen, dat nu een grote uitdaging is op het gebied van kunstmatige intelligentie en zelfstandige besturing. In de loop der jaren is de snelheid van autonome race-drones geleidelijk omhooggegaan. In recente autonome races vlogen de snelste drones met 2 m/s.
De meeste autonome race-drones zijn uitgerust met krachtige processoren, meerdere hoogwaardige camera’s en soms zelfs laserscanners. Hierdoor kunnen deze drones gebruik maken van de modernste oplossingen voor visuele waarneming, zoals het opbouwen van kaarten van de omgeving of het nauwkeurig volgen van de bewegingen van de drone in de loop van de tijd. De drones worden hierdoor echter ook relatief zwaar en duur.
Bij het Micro Air Vehicle Laboratory (MAVLab) van de TU Delft wordt er gewerkt aan lichte en goedkope autonome race-drones. Zulke drones kunnen door drone-raceliefhebbers worden gebruikt om mee te trainen of om tegen te racen. Als de drone klein genoeg wordt, kan er zelfs in huis mee worden geracet.
Autonome race-drone van 72 gram
Het drone-raceteam van MAVLab maakte de op dit moment kleinste autonome race-drone ter wereld. Deze drone heeft een diameter van 10 cm en weegt 72 gram. Met slechts één camera en zeer weinig rekenkracht aan boord vliegt hij autonoom door een racebaan met een snelheid die vergelijkbaar is met die van de snelste grotere autonome race-drones.
Computationally Efficient Autonomous Racing of a 72-gram Drone
Algoritmen
De belangrijkste innovatie die aan deze prestatie ten grondslag ligt, is de ontwikkeling van uiterst efficiënte en toch betrouwbare algoritmen. “De beelden van race-drones voor menselijke drone-races kunnen veel ruis bevatten of kunnen zelfs geheel verloren gaan bij het verzenden”, zegt Christophe De Wagter, oprichter van het MAVLab. “Menselijke piloten gebruiken dus vooral hun voorspellingen over hoe de drone zal bewegen wanneer zij met de sticks op hun afstandsbediening de drone besturen.”
Hoewel de beelden van een autonome drone niet door de lucht hoeven te worden verzonden, kan de interpretatie van de beelden door kleine drones soms volledig verkeerd zijn. De drone mist dan een poortje of beoordeelt zijn positie ten opzichte van het poortje totaal verkeerd. Daarom speelt een voorspellingsmodel een centrale rol in de aanpak van het MAVLab. Omdat de drone maar weinig rekenkracht heeft, gebruikt het model alleen de essentiële informatie, zoals de luchtweerstand op het frame van de drone.
Sensoren
“Wanneer we de drone en de sensoren kleiner maken, gaat de kwaliteit van de sensormetingen achteruit, zowel bij de camera als bij de versnellingsmeters”, zegt Shuo Li, die bij het MAVLab promoveert op autonoom drone-racen. “De normale methode, waarbij de door de versnellingsmeters gemeten versnellingen worden geïntegreerd over de tijd, is daarom kansloos. In plaats daarvan hebben we in ons voorspellingsmodel alleen de geschatte stand van de drone gebruikt. De afwijkingen van dit model in de loop van de tijd corrigeren we op basis van de zichtmetingen.” Er wordt een nieuw robuust filter voor het schatten van de positie en snelheid van de drone gebruikt, waarmee de ruisvolle zichtmetingen op de best mogelijke manier met de voorspellingen van het model worden gecombineerd.
Raceprestaties
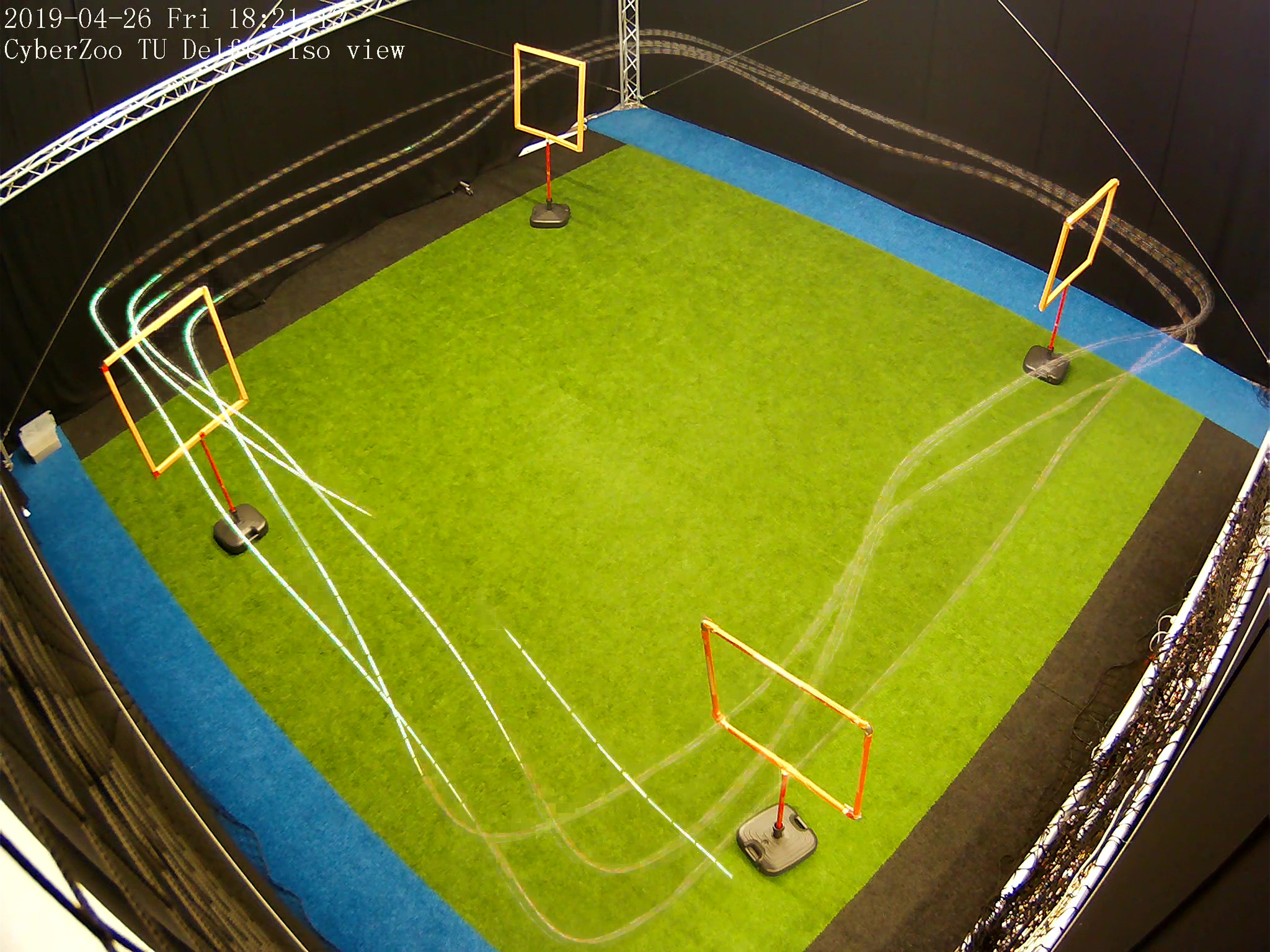
De nieuw ontwikkelde algoritmen van de drone zijn toegepast op een raceparcours met vier poortjes in de Cyberzoo van de TU Delft. De drone bleek meerdere ronden te kunnen vliegen met een gemiddelde snelheid van 2 m/s, waarmee hij zich kan meten met de snelste, grotere autonome race-drones. Detectie van poortjes speelt een centrale rol in de algoritmen van de drone, zodat de drone goed kan reageren, ook wanneer de poortjes worden verplaatst.
“We zijn op dit moment nog ver verwijderd van de snelheden die goede menselijke drone-racers halen. Om de volgende stap te kunnen zetten moeten de besturing, de schatting van positie en snelheid en de computervisie nog beter worden”, aldus Christophe De Wagter. “Hiervoor zijn efficiënte algoritmen essentieel, omdat die de drone in staat stellen om snel waar te nemen en te reageren. Kleine drones hebben ook als voordeel dat ze meer vrijheid hebben in de keuze van hun traject, omdat de poortjes voor hen relatief groter zijn.”
Meer dan alleen racen
Drone-racen is een snelgroeiende e-sport met steeds meer beoefenaars, maar autonome race-drones zijn ook voor andere toepassingen nuttig. “Voor de meeste drones met vier rotoren betekent sneller vliegen domweg dat ze een groter gebied kunnen bestrijken. Voor sommige toepassingen, zoals het opsporen en redden van mensen of het afleveren van pakketten, is een grotere snelheid enorm voordelig”, voegt Guido de Croon, wetenschappelijk leider van het MAVLab eraan toe. “Onze focus op lichte en goedkope oplossingen betekent dat hoge vliegsnelheden binnen bereik komen van een grote verscheidenheid aan drones.”
Meer informatie
Website: mavlab.tudelft.nl/the-worlds-smallest-autonomous-racing-drone/
Video: youtu.be/sOZJt35dIxM
Foto’s: surfdrive.surf.nl/files/index.php/s/evG2Mee3wjL3c0c
Drone-raceteam 2018-2019:
Christophe De Wagter, Guido de Croon, Shuo Li, Philipp Dürnay, Jiahao Lin, Simon Spronk
Contact:
Christophe De Wagter +31 15 27 88165 (eerste contactpersoon)
Guido de Croon +31 15 27 81402 (tweede contactpersoon)
Ilona van den Brink (persvoorlichting TU Delft) i.vandenbrink@tudelft.nl, 015-2784259