
Zwerm kleine drones verkent onbekende omgeving
Onderzoekers hebben een zwerm piepkleine drones gepresenteerd die geheel zelfstandig een onbekende omgeving kan verkennen. Dit werk, dat op 23 oktober is gepubliceerd in Science Robotics, is een belangrijke stap vooruit binnen het vakgebied van de zwermrobotica. De uitdaging zit hem in het feit dat de piepkleine, 33 gram wegende drones autonoom moeten navigeren met zeer beperkte sensoren en rekencapaciteit. Het gezamenlijke onderzoeksteam – bestaande uit onderzoekers van de TU Delft, de Universiteit van Liverpool en de Radboud Universiteit Nijmegen – hebben deze uitdaging opgelost door zich te laten inspireren door de relatieve eenvoud waarmee insecten hun weg vinden.
Inspiratie uit de natuur
Insectenzwermen brachten robotici op het idee dat kleine robots hun individuele beperkingen ook kunnen overwinnen door als zwerm te opereren. Zwermen kleine, goedkope robots zouden dan taken kunnen uitvoeren die momenteel buiten de mogelijkheden vallen van grote, individuele robots. Zo zou een zwerm kleine, vliegende drones een rampgebied veel sneller kunnen verkennen dan één grotere drone. Tot nu toe leken dergelijke zwermen toekomstmuziek.
Reddingsoperaties
De afgelopen vier jaar heeft een gezamenlijk onderzoeksteam van de TU Delft, de Universiteit van Liverpool en de Radboud Universiteit Nijmegen, zich ingezet om een zwerm piepkleine drones te ontwerpen die in staat is om een onbekende omgeving te verkennen. Het onderzoek werd gefinancierd door de Nederlandse Organisatie voor Wetenschappelijk Onderzoek (NWO) in het kader van het programma Natural Artificial Intelligence. Het doel van het onderzoeksproject was om stappen te zetten in de richting van het gebruik van zwermen drones bij reddingsoperaties.
Het voornaamste uitgangspunt was dat reddingswerkers in de toekomst een zwerm kleine drones zouden kunnen loslaten om een rampgebied, bijvoorbeeld een gebouw dat op instorten staat, te verkennen. Die zwerm drones zou het gebouw binnenvliegen, dit verkennen en vervolgens terugkeren naar het basisstation met relevante informatie. Daardoor zouden de reddingswerkers hun inspanningen kunnen richten op de meest relevante gebieden, bijvoorbeeld gebieden met overlevenden.

Zoeken naar slachtoffers
Voor het project werden piepkleine drones van camera’s voorzien en er in een overdekte kantooromgeving op uitgestuurd om twee dummy’s te vinden die de rol vervulden van slachtoffers in een rampsituatie. Uit deze reddingsopdracht, die als ‘proof of concept’ dienst deed, bleek duidelijk dat een zwerm voordelen biedt. Binnen zes minuten slaagde een zwerm van zes drones erin om ongeveer 80% van de open kamers te verkennen – wat voor één afzonderlijke drone onmogelijk zou zijn geweest. Daarnaast bleek het gebruik van een zwerm gunstig voor de redundantie. Eén drone ontdekte een slachtoffer, maar kon vanwege een hardwarefout in de camera geen beelden terugbrengen. Gelukkig legde een andere drone het slachtoffer ook op camera vast.


Een drone die een kamer verkent op zoek naar een (rode) dummy (links), en het “slachtoffer” gezien vanuit de boordcamera van de minidrone
Uitdaging
“De grootste uitdaging bij het realiseren van verkenning door zwermen zit hem in de individuele intelligentie van de drones”, vertelt Kimberly McGuire, de promovenda die het project uitvoerde. “Aan het begin van het project lag onze focus op het realiseren van de basale vliegfuncties, zoals het regelen van de snelheid en het vermijden van obstakels. Vervolgens hebben we een methode ontworpen waarmee de kleine drones elkaar konden waarnemen en ontwijken. Daarvoor hebben we elke drone voorzien van een chip voor draadloze communicatie en hebben we gebruik gemaakt van de signaalsterkte tussen die chips, een beetje zoals het aantal streepjes op het scherm van je telefoon kleiner wordt als je je thuis verder van de Wi-Fi-router beweegt. De grootste voordelen van deze methode zijn dat er geen extra hardware op de drone voor nodig is en er maar weinig berekeningen nodig zijn.”

Autonome navigatie
De grootste uitdaging bij verkenning door zwermen is dat het lastig is om kleine robots zelfstandig hun weg te laten vinden door een onbekende omgeving. Dit komt omdat kleine robots heel beperkt zijn in hun vermogen om waar te nemen en te rekenen.
Ook hier bood de natuur belangrijke inspiratie. Insecten maken geen gedetailleerde plattegronden. In plaats daarvan onthouden ze herkenningspunten en plekken die relevant zijn voor hun gedrag, zoals voedselbronnen en hun nest. “Het voornaamste idee achter de nieuwe navigatiemethode is om minimale eisen te stellen aan de navigatie: het enige wat wij van de robots eisen is dat zij de weg kunnen terugvinden naar het basisstation”, vertelt Guido de Croon, hoofdonderzoeker van het project. “Eerst verspreidt de zwerm robots zich door de omgeving, waarbij elke robot een andere voorkeursrichting volgt. Na de verkenning keren de robots terug naar een draadloos baken bij het basisstation.”
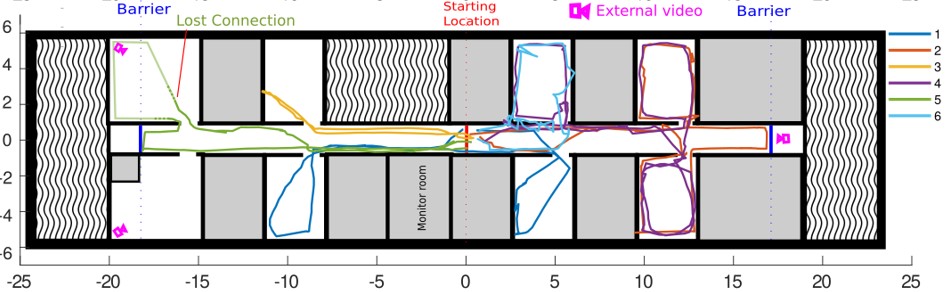
Trajecten van zes minidrones die in minder dan zes minuten een hele kantoorverdieping verkennen. De drones vertrekken vanaf het basisstation op de startlocatie in het midden, verkennen de open kamers, en keren ten slotte terug naar het basisstation
Insectenalgoritme
“De voorgestelde navigatiemethode is een nieuw type bug algorithm of insectenalgoritme”, vervolgt Kimberly McGuire. “Zulke algoritmes maken geen plattegrond van de omgeving met daarin alle obstakels, maar ontwijken de obstakels gewoon wanneer ze die tegenkomen. In principe is een gedetailleerde plattegrond heel handig, omdat een robot dan van het ene punt op de kaart naar het andere kan navigeren volgens een optimale route. Maar voor kleine robots is het te duur om zo’n plattegrond te maken. Het voorgestelde bug algorithm levert minder efficiënte routes op, maar heeft als voordeel dat het ook in piepkleine robots kan worden geïmplementeerd.”
Meer informatie
Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment
K.N. McGuire, C. De Wagter, K. Tuyls, H.J. Kappen, G.C.H.E. de Croon
Science Robotics, 23 October 2019
DOI: 10.1126/scirobotics.aaw9710
http://robotics.sciencemag.org/lookup/doi/10.1126/scirobotics.aaw9710
Het onderzoeksteam:
Kimberly McGuire, Christophe De Wagter en Guido de Croon (TU Delft)
Karl Tuyls (Universiteit van Liverpool)
Bert Kappen (Radboud Universiteit Nijmegen)
Gefinancierd door de Nederlandse Organisatie voor Wetenschappelijk Onderzoek (NWO), in het kader van het onderzoeksprogramma Natural Artificial Intelligence.
Contactinformatie:
Guido de Croon, g.c.h.e.decroon@tudelft.nl, 06 - 4825 5416
Dimmy van Ruiten (persvoorlichter TU Delft), 015 -278 1588, d.m.vanruiten@tudelft.nl
Bij geen gehoor: +31 152789111 (persvoorlichting TU Delft)
Video:
YouTube playlist:
https://www.youtube.com/playlist?list=PL_KSX9GOn2P9okvQGaGMP7KdXmF-7_iSV
Meer video’s:
https://surfdrive.surf.nl/files/index.php/s/gt1kdiOZI8VeaRj
Foto’s:
Foto's gemaakt door Guus Schoonewille, TU Delft.
Foto's gebruik voor media: https://surfdrive.surf.nl/files/index.php/s/EKAwnvW2eALbvfI