Gyroscopic balance assistance

In short: Our goal is to design a backpack-like device that can actively assist balancing in persons suffering from sensory or motor impairments.
The problem
Falling is the leading cause of accident-related injury among all age groups, but is particularly threatening among sufferers of conditions that affect motor control or result in sensory or cognitive impairment. Adults over the age of 65 are at great risk of serious injury during falling, and, in the event that the hip is fractured, have a 25% chance of dying from their injuries within 6-12 months of the event.
Falling can also have a profound psychological impact. Even if physical injury has not occurred, loss of confidence can reduce mobility and, as a result, lead to decreased independence in performing normal daily functions and a subsequent withdrawal from social and physical activities.
Our solution
In many cases, the exact circumstances of a fall are difficult to predict and often come as a surprise; hence, to prevent falls, our strategy is to assist balancing in general, regardless of the reason for instability. Conventional means of assisting balance, such as walkers and canes, have the shortcomings that (1) their effectiveness is dependent on the ability of the user to detect when a loss of balance has occurred, which is difficult for people with sensory impairment, and (2) these objects must be held when in use, which means that they prevent the hands from performing other tasks and that constant use may result in developing excessive reliance or maladaptation.
To develop a hands-free balance-assisting device capable of automatic detection and correction of instability, the field of wearable robotics offers great potential. Because many conventional robotic orthoses, such as exoskeletons, are too bulky and cumbersome for convenient daily usage by the elderly, we are currently developing a minimalistic and unobtrusive alternative. This device will take the form of a lightweight backpack-like corset (right) that can be quickly and easily mounted/dismounted and leaves the limbs free and uninhibited to allow comfortable movement in daily life. To promote healthy body dynamics, the device will provide assistance only when it is needed and will otherwise not influence the wearer’s motions.

How does it work?
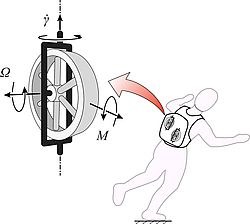
Contained within the backpack are two actuators called control moment gyroscopes (CMGs) that, like reaction wheels (e.g. ETH Zurich’s Cubli balancing cube robot), are capable of modifying their angular momentum to impart a moment (torque) on a body. Like reaction wheels, CMGs consist of rotating flywheels, but the mode of operation is fundamentally different: rather than change the spin rate of the flywheel Ω to generate a moment, rotation of an outer gimbal (by angular rate γ' ) reorients the flywheel and produces a significantly larger gyroscopic moment, denoted by M in the figure to the right. Because this moment is orthogonal to the gimbal and flywheel spin axes, it is applied directly to the gimbal bearings, rather than the gimbal or flywheel motor; the implication of this is that, for a relatively small gimbal motor torque and power, a considerably larger output moment is possible, allowing for the construction of a lightweight, yet effective wearable device.
The animation to the right shows a concept of the backpack and illustrates the operation of the CMGs. The green arrows represent the applied gimbal motor torques, which results in generation of gyroscopic torques at each flywheel (yellow arrows); by coordinating the two CMGs, the individual gyroscopic torques add together to form a net torque (red arrow) of the correct direction and magnitude to assist the wearer regain balance.
Here a short video by "Universiteit van Nederland" where Heike Vallery explains the gyroscopic effect.
Progress
Since initially proposing our device in 2012 (see [Li2012]), we first constructed a proof-of-concept testbench, as shown in the video below (see also [Lemus2014]). We have managed to accurately reproduce arbitrary moments in the intended range, and have demonstrated the feasibility of using CMGs to stabilize an inverted pendulum in a single axis. In the video, a single CMG is used to generate moments that simulate a virtual spring holding the inverted pendulum upright.
Later, in experiments with human subjects (see [LemusBerry2020]), we tested a backpack-like device containing a single CMG. Wearing this system, healthy subjects and stroke survivors performed better in challenging tasks.
In 2022, we finalized a prototype device containing 2 CMGs (similar to the ones described in [Meijneke2021]) that combines a number of unique features over comparable balancing technology:
- High functionality: balance assistance in any potential fall direction
- Lightweight design: the mass is ~5 kg, down from the ~12 kg using our existing CMG technology
- High output: maximum assistive moment of ~30 Nm
- Low power consumption: ~ 80 W, with enough battery life for over 1 h of continuous balance assistance or considerably longer when assistance is not required.
- Compact and robust design: fits into a 40 L backpack
Research group
- Heike Vallery (project leader)
- Bram Sterke (Erasmus MC)
- Katie Poggensee (Erasmus MC)
- Daniel Lemus Perez
- Saher Jabeen
- Andrew Berry
Partners
In our work we are pleased to acknowledge collaboration with Erasmus Medical Center and Rijndam Rehabilitation, with Hyperion Technologies B.V. (Delft, NL), with Leiden University Medical Center (LUMC, Leiden, NL) and with VU University Medical Center (VUMC, Amsterdam, NL). Formal clinical evaluation of the device will be performed at EMC and also at the Shirley Ryan Ability Lab (formerly the Rehabilitation Institute of Chicago).

Acknowledgements
This work was supported by the NWO Vernieuwingsimpuls VIDI. Funding for this work has also been gratefully received from the US Dept of Education RERC (Rehabilitation Engineering Research Centers) MARS3 initiative under NIDRR grant number H133E120010. MARS3 (Machines Assisting Recovery from Stroke and Spinal Cord Injury for Reintegration into Society) was a collaboration between the Shirley Ryan Ability Lab (fka Rehabilitation Institute of Chicago), University of Illinois at Chicago, University of California at Irvine, Northwestern University, The Illinois Institute of Technology, University of Alabama at Birmingham, and the Delft University of Technology, with the collective goal of developing robots to restore function in patients and facilitate their return to society. We are continuing the collaboration within the follow-up RERC COMET, under NIDILRR grant number 90REGE0005-01-00.
Support for this project has also been provided through the Marie Curie Career Integration Grant “WANDER” (PCIG13-GA-2013-618899), through Stiftelsen Promobilia (15135), and through Medical Delta.
More information
A 2020 blogpost on the project, by Andy Berry
In September, 2020, our balance-assisting gyroscopic backpack was nominated for the "best tech idea 2020" of the Dutch magazine "KIJK".
Selected publications
[Meijneke2021] Cor Meijneke, Bram Sterke, Giel Hermans, Wouter Gregoor, Heike Vallery and Daniel Lemus, Design and Evaluation of Pint-Sized Gyroscopic Actuators, Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 2021 (.pdf)
[LemusBerry2020] Daniel Lemus/Andrew Berry, Saher Jabeen, Chandra Jayaraman, Kristen Hohl, Frans van der Helm, Arun Jayaraman and Heike Vallery., Controller synthesis and clinical exploration of wearable gyroscopic actuators to support human balance , Scientific Reports, 10 2020
[Lemus2017] Daniel Lemus, Jan van Frankenhuyzen, Heike Vallery, Design and Evaluation of a Balance Assistance Control Moment Gyroscope, Journal of Mechanisms and Robotics, 9(5) 2017
[Berry2016] A. Berry, D. Lemus Perez, R. Babuška, H. Vallery, Directional Singularity-Robust Torque Control for Gyroscopic Actuators, IEEE/ASME Transactions on Mechatronics, 21(6), 2016 (.pdf)
[Paiman2016] C. Paiman, D. Lemus Perez, D. Short Sotero, H. Vallery, Observing the state of balance with a single upper-body sensor, Frontiers In Robotics and AI, 3(11), p.1-17, 2016 (.pdf)
[Lemus2014] D. Lemus, H. Vallery, Towards Gyroscopic Balance Assistance: Proof of Concept, Proceedings of the 36th International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), August 26-30, 2014, Chicago, USA. (.pdf)
[Li2012] D. Li, H. Vallery, Gyroscopic Assistance for Human Balance, Proceedings of the 12th IEEE International Workshop on Advanced Motion Control (AMC), March 25-27, 2012, Sarajevo, Bosnia and Herzegovina.
[Vallery2012] H. Vallery, C. O’Brien, A. Bögel, R. Riener, Cooperative Control Design for Robot-Assisted Balance during Gait, at-Automatisierungstechnik, 60 (11), p. 715-720, 2012. (.pdf)
Patents
[P1] H. Vallery, D. Lemus (filed 2015). Gyroscope for Balance Assist, Dutch patent application N2014927.
