Predictive Synchromodality for more Efficient Container Transportation
Problem Domain
Freight transport is often planned well in advance. Train schedules are decided months in advance, barges depart with frequencies decided weeks in advance and the shippers specify exactly how the containers should be transported when they place the order. In reality, many of these pre-defined decisions cannot be carried out. The train will e.g. be delayed if the train in front breaks down and the barge cannot sail if the water level is too low. To effectively address the disturbances that will happen in the transport system, the concept of synchromodal transport is introduced and being promoted. In synchromodal transport, the shippers buy the service of a transport within a specified timeframe from origin to destination, without interfering with operational decisions. The carriers are responsible for fulfilling the agreed transport, but are free to cooperate with other carriers and operators. Furthermore, in an ideal synchromodal transport system, agreements are made just before they are implemented, i.e. we have a real-time setting, so actions can always be decided based on the latest information.
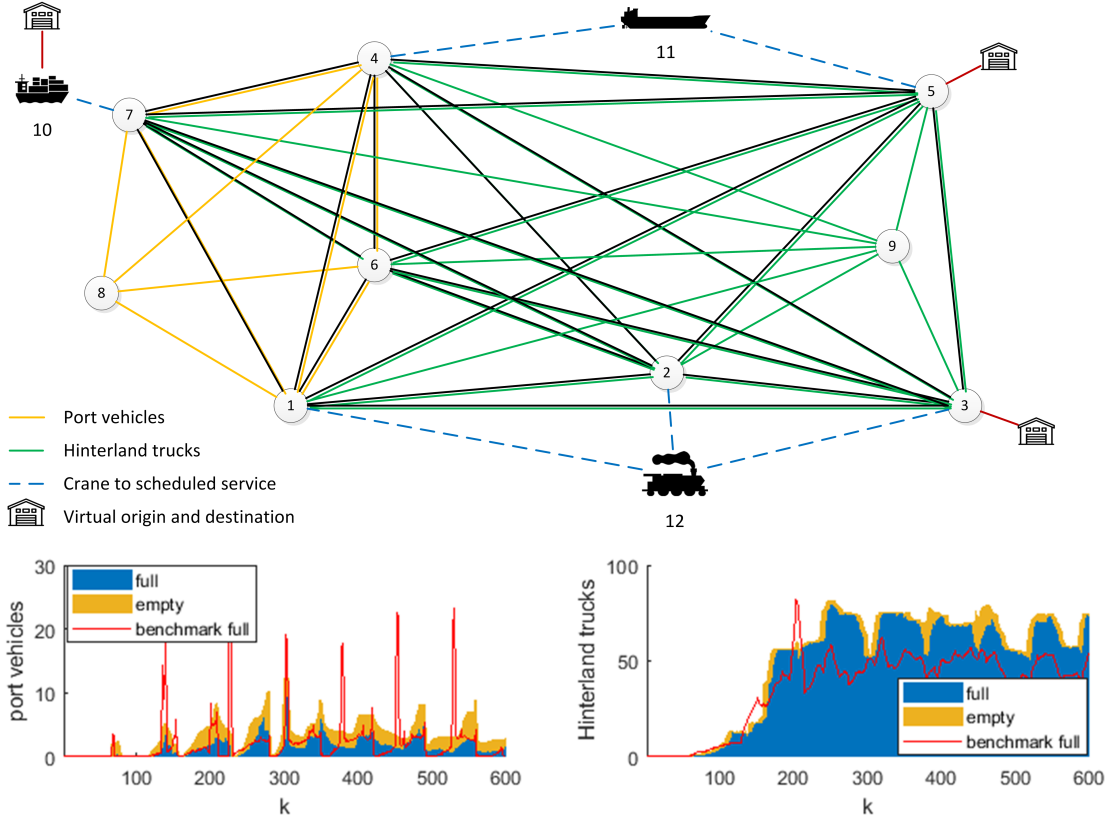
Figure text: One result from the project shows that, when routing of containers and trucks are optimized simultaneously, the number of trucks needed is more stable. This is especially the case when the demand is highly volatile. Therefore, the proposed planning is not only more realistic, the outcome is desirable from the management point of view.
Goals/Objectives
The concept of synchromodal transport has been thoroughly discussed and is believed in both academia and industry to improve not only the economy of freight transport, but also the environmental and societal impacts, as it can reduce the number of (empty) trucks on the roads. However, the current planning methods for synchromodal transportation are highly simplified and leave many open questions. This project focuses on how to ensure that the real-time decisions are reasonable over a long time-period and how cooperation between entities can be realized. The guiding question behind the project is thus:
How can synchromodal transport be planned most efficiently in a dedicated multi-entity network?
Efficiency is in this context a tradeoff between reliability, cost and pollution. A dedicated multi-entity network refers to a network where the freight is moved between multiple origins and destinations by multiple business entities (e.g. a truck company, a terminal operator and a barge operator) that are all dedicated to work synchromodal.
Approach
In order to reach real-time feasibility, the project looks at the transport planning problem from a control perspective. Model predictive control is mainly used, since it can ensure the actions taken now are reasonable when the performance of the transport system is monitored over time. Various levels of cooperation between different entities are researched based on existing and new, distributed and de-centralized model predictive control schemes.
The research is based on use-cases from the industrial partners in the project. This enables us to take realistic assumptions when we develop solution methods and to test the methods on realistic data.
Figure text to video: The model predictive controller first measures the current state of the system, then formulates an optimization problem and solves it to find the optimal sequence of actions to take. The first action in this sequence is implemented in the system and the cycle starts over.
Funding
This project is part of ”Complexity Methods for Predictive Synchromodality” project (project 439.16.120) of the Netherlands Organisation for Scientific Research (NWO).
Contact person
PhD Candidate: R.B.Larsen
Daily supervisor: Dr. B. Atasoy
Thesis supervisor: Prof.dr. R.R. Negenborn