Dynamics and Swing Control for Grab Ship Unloader
Background and Research Problems
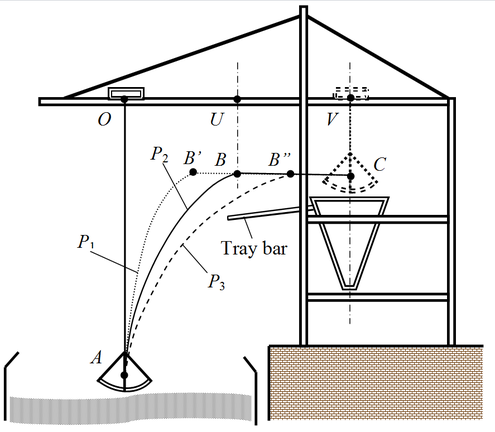
During the operation of grab ship unloader, trolley and hoisting mechanism usually work together. Grab ship unloader currently have two work modes that are static unloading and dynamic unloading. The grab unloads the materials when the trolley reaches discharge point and the grab does not swing, which is static unloading. Dynamic unloading is that the unloader throws the materials by using the swing of the grab when the trolley reaches discharge point. Whether static unloading or dynamic unloading, the swing position of the grab are required to be controlled. The swing control of the grab is usually achieved through the planning of the speed of the trolley. Unlike the container crane can be easily installed angle sensor, the open loop manner is typically used in the swing control of grab ship unloader. An open loop mode must be based on the precise dynamic model of trolley-grab system. Since the rope length of unloader could be changed in the work process, the problem in the research lies in how to build nonlinear dynamic model of the system and use appropriate swing control methods.
Research Goal
The main goal of this research is to establish the precise dynamic model of grab ship unloader and seek appropriate swing control strategies for industry application.
Research Contents
1. An improved Zero Vibration (ZV) method and parameter sensitivity analysis for the swing control of grab ship unloader.
2. The influence of full load and empty load on oscillation frequency.
3. Try to find a more efficient method of calculation for the swing control.
4. Study the appropriate opening time of the grab, when it unloads the different materials.
Approach
This project adopts simulation to obtain the optimal motion curves of the trolley and the grab of grab ship unloader in the operating conditions. The data obtained from the simulation can be used in the real control of grab ship unloader.
Dynamic model of the trolley-grab system is built using Lagrange method and the fourth order Runge-Kutta method is used to solve the motion function.
An improved ZV method that uses the equivalent frequency and equivalent damping ratio to respond to system changes in rope length is adopted, which can control the residual swing angle in a certain range. Because the output shafts of the trolley drive motor and the hoisting motor in modern unloader are usually equipped with high-resolution rotary encoders, the exact location of the trolley and actual length of the rope can be acquired precisely. Therefore, the modeling error can be controlled within a small range.
A 3D dynamic model of the grab based on ADAMS will be considered to study the influence of full load and empty load on oscillation frequency.
Discrete element method (DEM) will be considered to study the appropriate opening time of the grab, when it unloads the different materials.
Funding
This research is supported by the China Scholarship Council, and Wuhan Guide electric Co., Ltd.
Contact
Yong Zhou
E Y.Zhou-8@tudelft.nl
Mekelweg 2
2628 CD Delft
Supervisor: Prof.dr.ir. G. Lodewijks
Daily supervisor: Dr.ir. D.L. Schott