Toward Smart Grabs
While you are reading this text, hundreds of ocean going bulk carriers are transporting bulk solids, such as iron ore and coal, from origin mines to destination ports. Customers of these bulk solids are mainly steel manufactures and power plants. Grabs are employed at destination extensively to unload iron ore and coal from ship holds. A time-efficient and reliable unloading process is required to minimize costs for port operators, and to deliver cargoes to customers on time. In practice, many factors, such as moisture, varying material properties over the cargo depth and grab’s dynamics, contribute in creating challenges for achieving the desired grab’s performance. A promising solution for improving the unloading process of bulk solid carriers is to focus on enhancing the design and operation of grabs by using simulation and mechatronic solutions.
Since 2009, there has been a collaboration between Maritime and Transport Technology department of TU Delft and NEMAG B.V., the leading Dutch grab manufacturer; this collaboration has led to an accurate modelling of the grabbing process for pellets (Lommen, 2016) and cohesive iron ore (Mohajeri, 2020). Co-simulations of Discrete Elements Method (DEM) and MultiBody Dynamics (MBD) are employed for such a purpose. Novel design methods based on Design of Experiment as well as surrogate modelling have been developed. Furthermore, realistic operation conditions, such as bulk surface variability have been included in the design process. The research led to a promising and award winning new grab concept with substantial higher productivity of the unloading process. More details can be read here.
The following video illustrates the process required to develop an accurate co-simulation of grab and cohesive iron ore during Javad’s PhD research. To develop such a simulation, field experiments were conducted to collect valuable information regarding the grabbing process, such as bulk density of cargo, volume of collected material and the grab’s kinematics. The cargo properties were replicated in the DEM simulation environment, and eventually the grabbing process were simulated accurately.
Funding
This research is partially funded by grab manufacturer NEMAG B.V., the Netherlands and the TKI-Maritiem allowance of the Dutch Ministry of Economic Affairs and Climate Policy. Their support is gratefully acknowledged.
Contact
- Javad Mohajeri - PostDoc researcher
- Dr.ir. Dingena L. Schott
- Dr.ir. Jovana Jovanova
- Dr.ir. Yusong Pang
Objective
The primary objective of this PostDoc project is to further increase the grab’s efficiency during the unloading process of cohesive bulk solids. This will be achieved by converting the step-by-step research and development process into a more integrated approach with the aid of smart technologies, as well as by using the tools that were developed in our research group (e.g. accurate DEM-MBD co-simulation).
Usually grabs are custom designed to be manufactured, as each bulk cargo has its own specific characteristics, such as bulk density range and cohesion strength, and each ship unloader (crane-grab system) has a specific lifting capacity. In the traditional customization process, empirical relationships are employed to find proper design parameters, which is done basically by interpolating on existing data. During this PostDoc project, comprehensive design rules will be established by running optimization analysis using the co-simulation setup, in which a wide range of operational conditions (e.g. crane lifting capacity and bulk characteristics) can be tested for a full range of grab design parameters.
Furthermore, a maximized efficiency for unloading of bulk carriers will be achieved by making grabs optimized, adaptive and smart. The maximized efficiency will be achieved by making the unloading process least dependent to uncontrollable factors, such as bulk surface variability and crane operator. That will revolutionize the entire unloading process of bulk carriers.
Approach
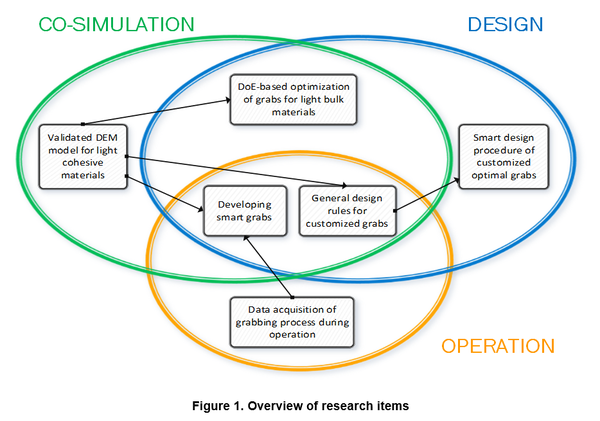
Figure 1 illustrates how the DEM-MBD co-simulation environment will be utilized to create a link between simulation, design and operation of grabs.
Four different research items are included in this project:
- Co-simulation for light bulk materials: Developing an accurate co-simulation for the grabbing process of a light cohesive bulk material, such as coal.
- Establishing general design rules: Using the co-simulation environment, general design rules will be established for various grab sizes. This includes establishing a multi-objective optimization framework, including both grab geometric parameters as well as operation conditions (e.g. bulk surface variation) in the design procedure.
- Monitoring of grabbing process: so far, the grabbing process was recorded by executing intensive field experiments with special set-ups. This approach usually required sending a measurement team (e.g. for some hours) to the bulk terminal for obtaining data. In contrary, by monitoring the process in operational conditions for longer time spans (e.g. 24-48 hours), more data can be obtained. Proper sensor measurement systems will be developed for such a purpose.
- New generation of efficient smart grabs: developing a new generation of smart grabs, based on extensive operational data and validated DEM tools.