
Distributed Mechatronics
Compliant mechatronic systems with high numbers of individual transducer elements could be useful for various complex distributed sensing and/or actuation tasks in industry (e.g. handling fragile silicon wafers), precision industry (e.g. compliant robots) and medicine (e.g. drug-delivery). Often such systems are impractical to implement due to high total cost of laborious engineering, numerous components and time-consuming assembly process. To a significant extent these limitations can be overcome by using distributed (‘smart’ material) transducers instead of the conventional ones. Entire mechatronic systems can be realized by etching its individual transducers and components into a monolithic ‘smart’ material substrate. However, the today’s ‘smart’ materials also come with their challenges, both in actuation and sensing phenomena. Frequently the smart materials are proposed for application where conventional transducers significantly outperform them, while no attention is paid to distributed mechatronic systems that are difficult to design, construct and miniaturize with conventional transducers.
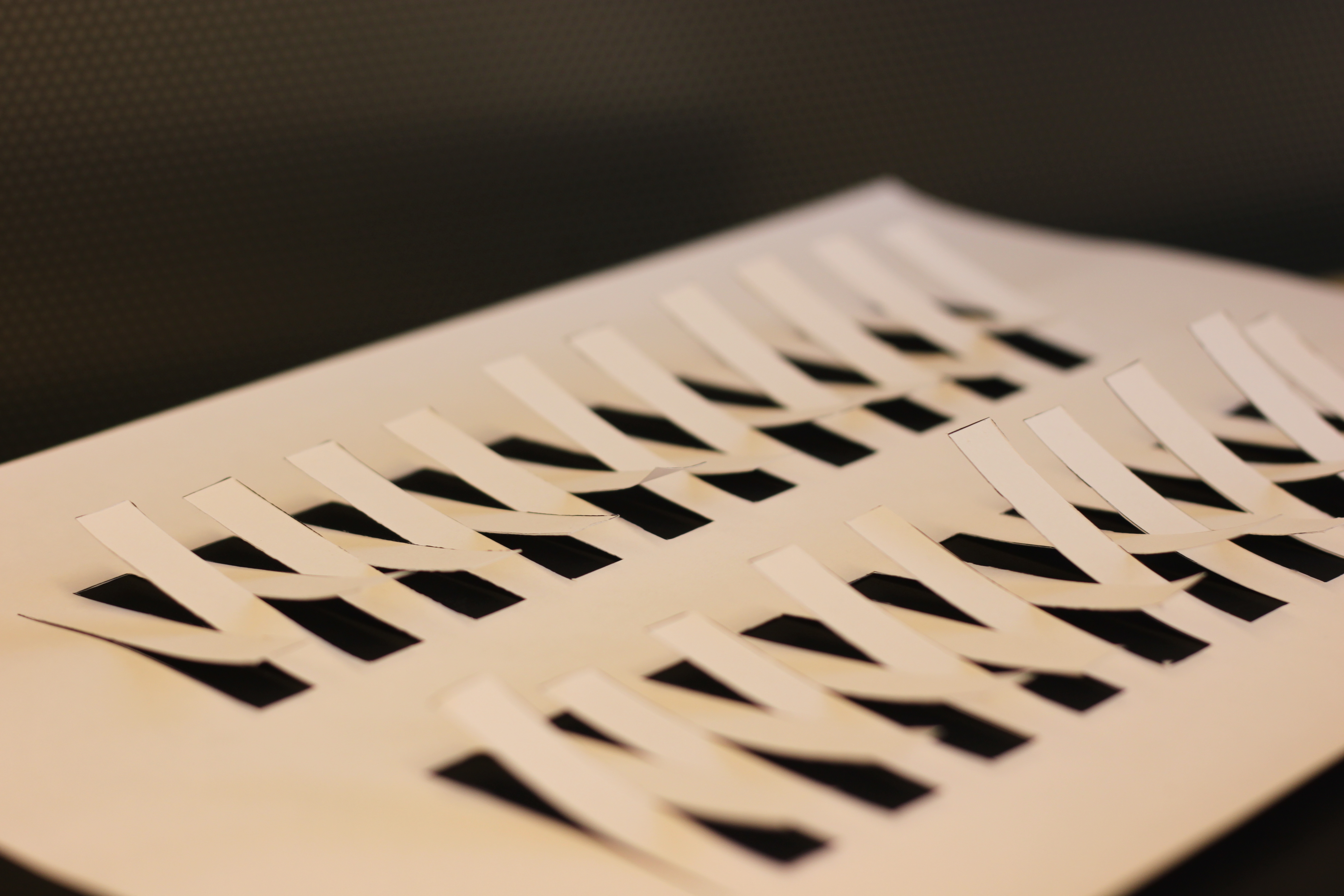
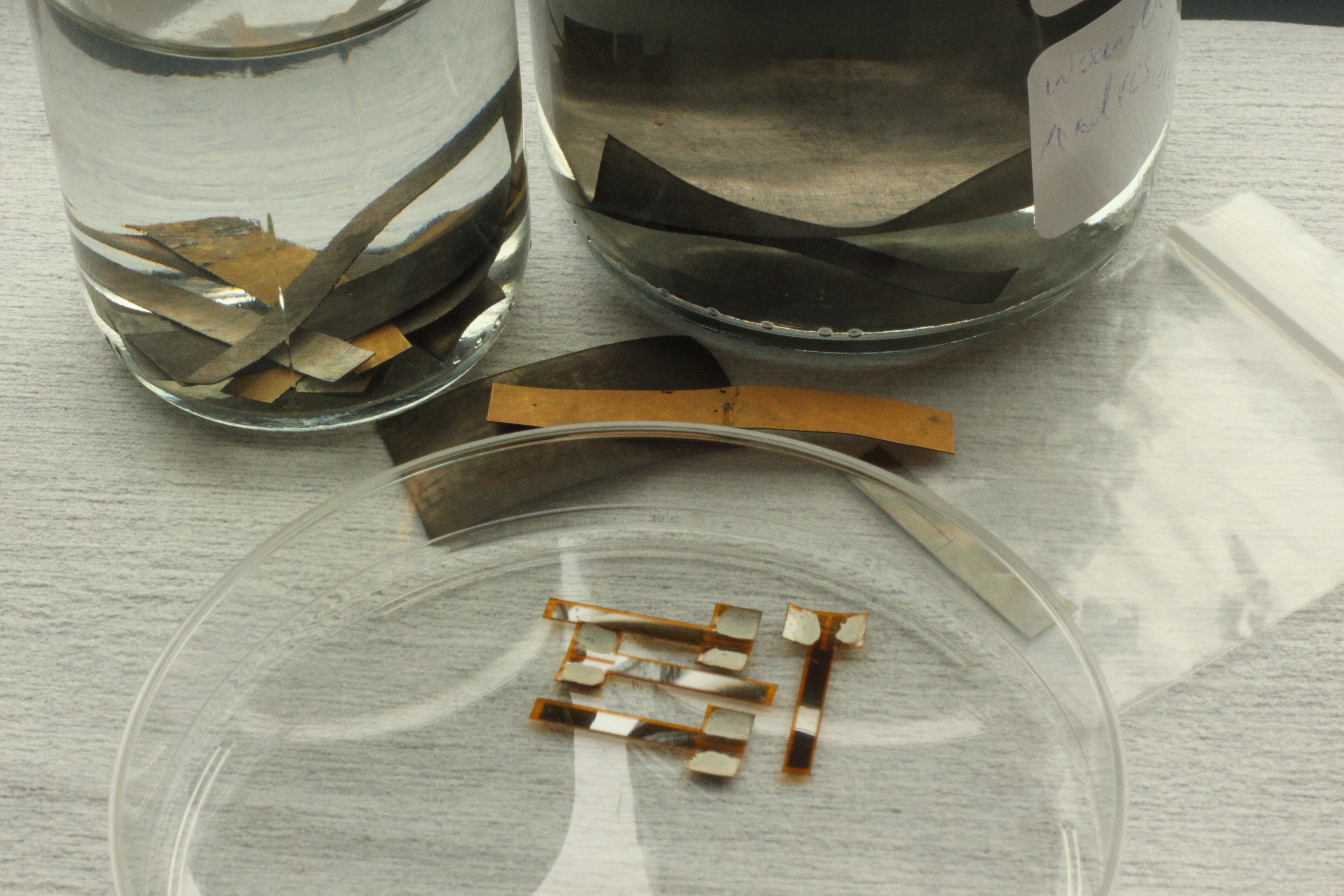
This research focuses on different aspects of realizing distributed compliant mechatronic systems using monolithic ‘smart’ material substrates. The individual studies seek to improve the available sensing and actuation methods, and investigate application of etching, cutting and deforming techniques on smart materials to obtain novel active distributed 3D structures.
Improved Sensing and Actuation of Smart Materials
This work studies and compares sensing and actuation techniques of different smart material transducers in order to overcome the limitations of individual transducers or techniques by combining multiple of them to complement each other.
-
Students: WH MohdIsa (PhD), Dr. A. Hunt (PD)
Advisors: Dr. Hassan HosseinNia, Prof. dr. ir. Just Herder
Project term: 2016-2020This work studies and compares sensing and actuation techniques of different smart material transducers in order to overcome the limitations of individual transducers or techniques by combining multiple of them to complement each other.
Publications
- WH MohdIsa, A Hunt, SH HosseinNia, Active sensing methods of ionic polymer metal composite (IPMC): Comparative study in frequency domain, 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), 546-551
- WH MohdIsa, A Hunt, SH HosseinNia, Sensing and Self-Sensing Actuation Methods for Ionic Polymer–Metal Composite (IPMC): A Review Sensors 19 (18), 3967, 2019
- A Hunt, M Freriks, L Sasso, PM Esfahani, SH HosseinNia, IPMC Kirigami: A Distributed Actuation Concept International Conference on Manipulation, Automation and Robotics at small scale, 2018