Precision Mechatronics
Dutch high tech industry is constantly pushing requirements of bandwidth, precision and robustness. In semiconductor industry, we move towards ever-increasing production of integrated chips, solar cells and ever decreasing transistor sizes; in healthcare, demand for universally applicable and safe devices is increasing. Linear controllers continue to be working backbone despite their limitations. Nonlinear controllers can significantly improve performance, but they rarely meet industry standards in design and large-scale applicability. Industry compatible advanced nonlinear control can create a new roadmap and potentially lead to large performance upgrades. However, introducing nonlinearity introduces new challenges in design and analysis.
Main PI

H. (Hassan) Hossein Nia
Reset Control Design for Piezo-Positioning Systems and Drives in Presence of Unwanted Modes and Nonlinearities
- PI: Hassan HosseinNia
- Timespan: 2023-2028
The increasing demand for future technologies has led to a rise in the production of chips demanding for machines with higher precision and speed. Physik Instrumente (PI) company plays an important role in this field by developing piezoelectric precision positioning systems. However, their current systems face problems such as nonlinearity and undesired vibration that limit the precision and speed of the motion for the future generation of devices. Conventional linear control strategies, which are currently used in these systems, are fundamentally limited in achieving the subnanometer precision required.
The goal of this project is to improve the precision, bandwidth, and transient response of piezo-positioning systems and drives. This will be achieved by designing and analyzing a reset controller, implementing active damping, and designing a mechatronic notch through the distribution of actuators and sensors for higher order modes. This project will lead to significant advancements in the field of precision motion systems and contribute to the growth of precision mechatronic technologies.
This project is funded by Physik Instrumente (PI) and TKI under TIPP program.

Frequency Domain Nonlinear Precision Motion Control: From Theory to Practice in Semiconductor Bonding Equipment
- PI: Hassan HosseinNia
We have entered the era of AI where the demand for the production of chips is rising because of the increasing adoption of AI in many industries for technologies, such as voice recognition, object detection, medical simulation, intelligent routing, and autonomous driving. ASMPT, as one of the key players in the sector in charge of supplying machines for the production of chips, requires more than ever today to increase the precision and speed of these machines. Precision motion control plays a critical role in our capability to create and manipulate features on the sub-micrometer scale. However, our conventional feedback motion control strategies, such as linear proportional-integral-derivative (PID) algorithms with linear filters, cannot meet the requirements in precision and speed set by the nanoscale. What makes these linear feedback strategies so appealing are fundamental frameworks for their design, synthesis, and analysis, such as loop-shaping. However, this framework does not exist for nonlinear control systems.
In this project, we propose to develop a loopshaping framework for analysis and synthesis of nonlinear controllers in the frequency domain with a focus on precision motion applications in bonding machines of ASMPT where trajectory tracking and settling performance should be improved.
This project is funded by ASMPT and TKI.

Beat the Heat: Zero Heat Dissipation and Energy Efficient Electromagnetic Actuators
- PI: Hassan HosseinNia
- Co-PIs: Andres Hunt, Jianning Dong
- Timespan: 2023-2027
Mechatronic systems need constant improvements, to meet the ever‐increasing demand for achievable accuracy and energy efficiency. During the last decade, the precision industry has been challenged by modeling and controlling thermal effects to improve accuracy. Electromagnetic (EM) actuators are used In high‐precision motion systems which can achieve (sub‐)nanometer position accuracy. However, EM actuators suffer from thermal dissipation due to the ohmic heating of the coil. For example in the case of levitation stages, an EM actuator can provide both the propulsion (dynamic) force and levitation (static) force to move and suspend the payload respectively. In such a case, although the propulsion force is applied intermittently, the levitation force should be present continuously resulting in significant heat dissipation, especially at standstill, and thus affecting the achievable accuracy. For such applications of EM actuators, there is a huge need to reduce the heat dissipation of EM actuators.
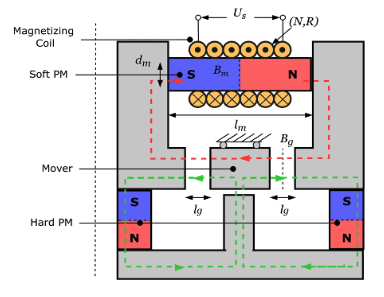
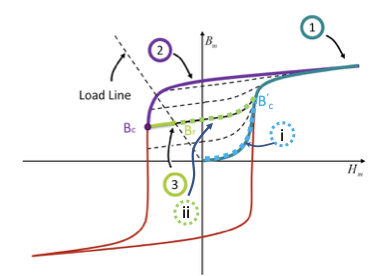
In this project, we will introduce a new class of EM actuators, based on tuneable magnets. A tuneable magnet (TM) constitutes a low coercive permanent magnet (PM) with a coil to change/tune the magnetization of the PM to any arbitrary value(s) and thus the output force/torque. TM actuators combine the versatility and disturbance rejection features of conventional EM actuators together with the thermal stability and energy efficiency of passive devices like permanent magnetic bearings. In a feasibility study, we have shown the potential of TM actuators for static applications. However, in order to be applied to dynamic precision motion systems, we lack the theories on efficient tuning and optimal electromagnetic circuit design of such actuators. Moreover, for applications in high‐end systems, the accuracy, and efficiency of the tuning need to be improved.
The objective of this project is to develop theories for (i) efficient and precise tuning of the magnetization level of the TM that will be used to design EM actuators dissipating almost no heat and providing constant (dynamic) force with negligible (low) power consumption, (ii) fast and robust power electronics driving such actuators and (iii) designing a hybrid PM and TM actuator to minimize heat for dynamic applications and (iv) realizing technology demonstrators to showcase the salient features of the actuators.
This collaborative project involves academic partners from TU Delft and Prof. David Trumper from MIT, along with three industrial partners: MI partners, IDE technology, and Settels Savanije.

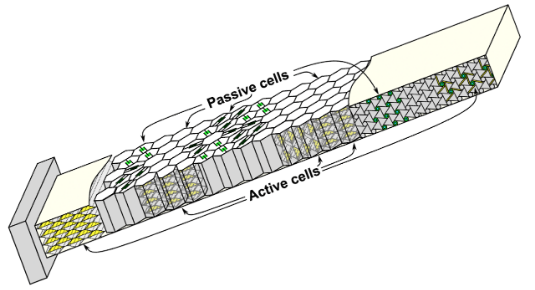
MetaMech: Mechatronic MetaMaterial for Dynamic Performance
- PI: Hassan HosseinNia
- Co-PIs: Wouter Haakvort, Just Herder, Farbod Alijani, Andres Hunt
- Timespan: 2020-2025
The high-tech mechatronic industry in the Netherlands is highly competitive and requires machines to run with ever- increasing speed and precision. State of the art machines have practically reached the asymptote of high support stiffness with a low amount of mass. Hence, higher precision and short cycles activate high frequency modes that need to be suppressed in order to obtain the desired performance and further increase the bandwidth. If significant damping is required, common passive dampers will unfortunately add significant mass, because the amount of damping is proportional to the added mass. Additionally, they also provide poor performance in the presence of multiple low frequency and/or varying modes. Potentially however, active damping can be the solution when reduced mass is of main concern and multiple modes are present.
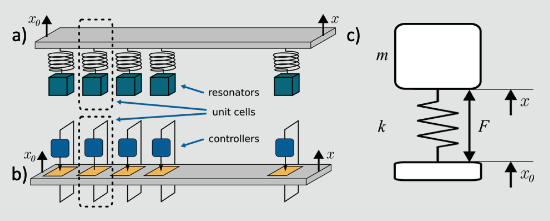
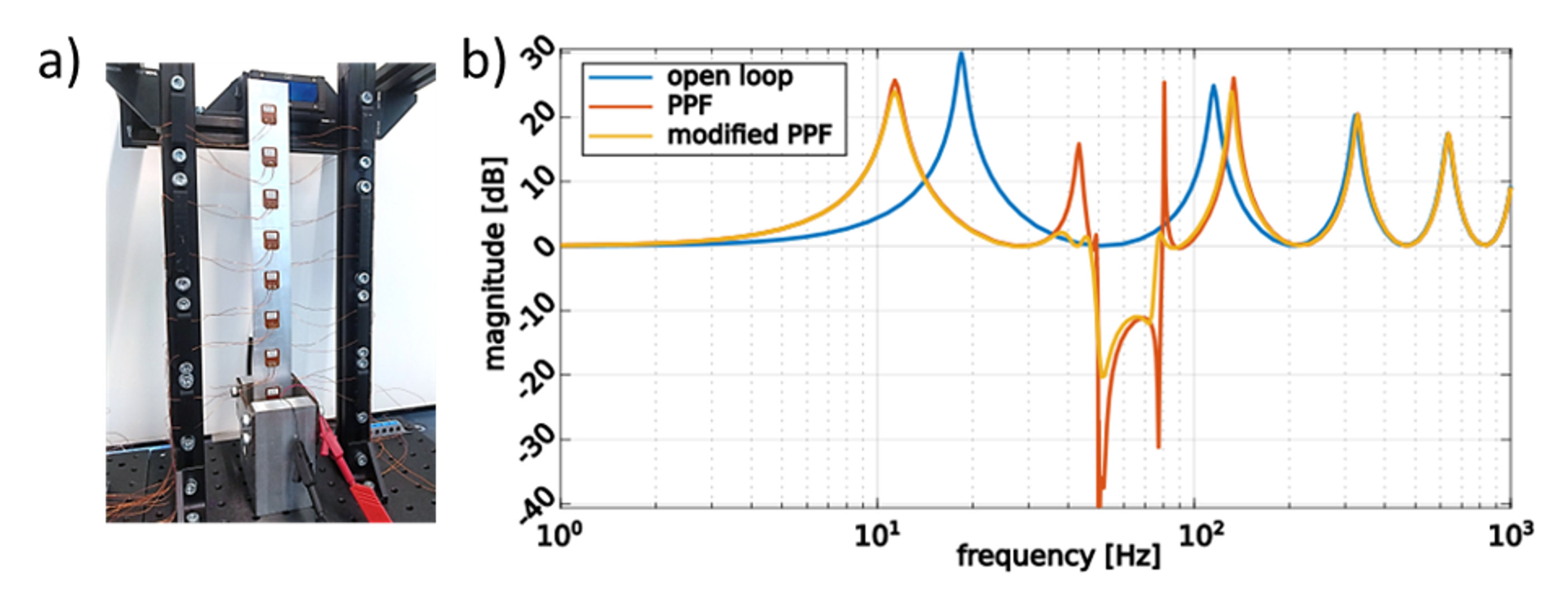
This project proposes to combine the two engineering disciplines of mechatronics and metamaterials to create a mechatronic metamaterial (MetaMech) structure for active vibration suppression. This MetaMech structure is characterised by integrating smart material actuators like piezoelectric in a distributed manner into spatially architectured flexible structures (compliant mechanisms). The goal of MetaMech is to overcome (i) the mass limitation in passive damping and force limitation in active damping by an optimized distribution of active and passive material into a lattice metamaterial structure; and to overcome (ii) the fundamental limitations associated with known linear damping methods to enable broadband and/or varying mode suppression by developing adaptive nonlinear vibration suppression methods. If successful, MetaMech will be an adaptive damping material that enables not only the utilisation of compliant mechanisms for highly dynamic motion systems with larger deflections, but also increases the precision and speed of current motion systems that are limited by broadband vibration modes.
This collaborative project involves two academic partners from TU Delft and Twente University, along with four industrial partners: ASML, Demcon, Physik Instrumente (PI) and VDL.
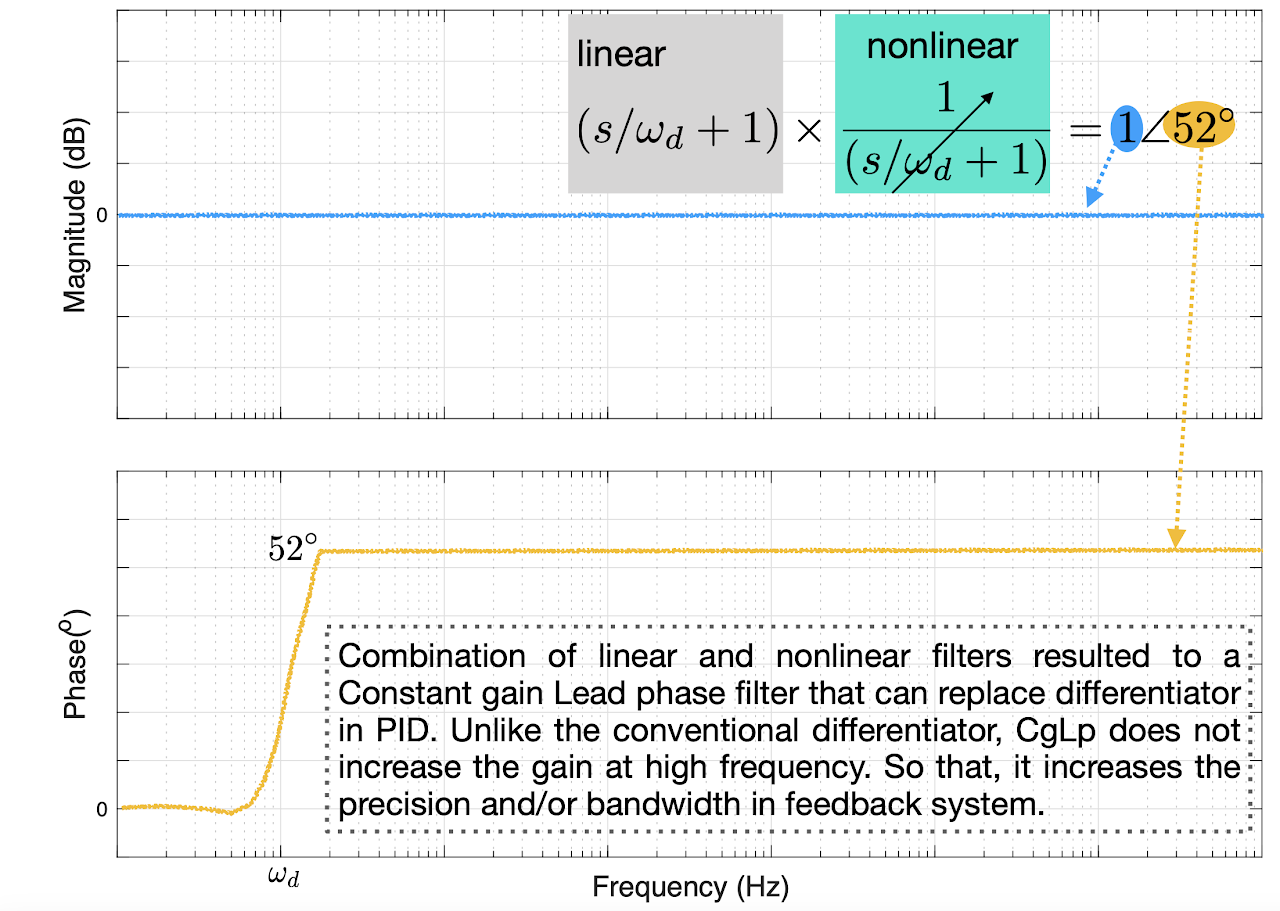
From PID to Complex Order Control (CLOC)
- PI: Hassan HosseinNia
- Co-PIs: Marcel Heertjes, Just Herder, Maurice Heemels
- Timespan: 2018-2023
The high-tech industry in the Netherlands is highly competitive and requires machines to operate with ever-increasing speed and precision. The pursuit of high speed has led to a system design that favors reducing the mass of moving parts. However, this approach increases their compliance, which, in turn, diminishes achievable speeds. Additionally, the performance specifications for control have become exceedingly demanding. Classical Proportional-Integral-Derivative (PID) control, which is still applied in 95% of the high-tech industry, is no longer sufficient to meet these challenges. Its linearity is particularly unsuited for simultaneously handling precision, speed, and stability.
The novel control technique developed by CLOC will overcome these fundamental limitations by unifying advanced control concepts, resulting in a design compatible with current industry standards. The key concept involves applying reset strategies as primary nonlinear techniques to overcome the limitations of linear controllers. CLOC will develop a novel frequency domain tool for such nonlinearities to realize complex-order control. Additionally, we will demonstrate the validity and generality of the developed concepts through experimental and industrial verification on high-speed positioning stages, assessing overall performance.
This collaborative project involves two academic partners from TU Delft and TU Eindhoven, along with three industrial partners: ASML, Demcon, and Hittech Multin.