
BioMorphic Intelligence Lab Kick-off Event and Symposium
02 December 2022 14:00 till 17:15 - Location: Lecture Room F, Faculty of Aerospace Engineering | Add to my calendar
Registration is not necessary
Drones that look and act like forest animals giving us information about the effects of climate change on forest biodiversity. Search and rescue aerial robots that can blindly feel their way around pitch dark disaster areas the way humans would. The new BioMorphic Intelligence Lab, headed by lab directors Dr. Salua Hamaza at the faculty of Aerospace Engineering and Dr. Nergis Tömen at the faculty of Electrical Engineering, Mathematics and Computer Science, researches bio-inspired solutions for aerial robots. These robots are valuable tools, for example for saving forests through ecology monitoring, helping farmers with their harvest, and for search and rescue missions.
The lab is now up and running. On 2 December 2022, the PhD students at the lab will present themselves and their research topics. The symposium and kick-off event is open to all staff and (Master) students who have an interest in biologically inspired aerial robotics.
Programme
| PhD Student | PhD Research Topic | |
|---|---|---|
| 14:00 | Sunyi Wang
| Distributed Airflow Sensing and Processing on Flapping Wing MAVs The use of airflow information has proven to be crucial for flyers in nature to avoid predators, to assist in the detection of incoming disturbances and to aid flight control stability. We aim to enrich the lightweight, low-power, and effective low-speed airflow sensing instrumentation inspired by the hair-like structures and mechanoreceptors found in nature. These airflow sensors are then integrated onboard a novel flapping wing MAV platform which is subject to size, weight, power limitations (SWaP), and is easily disturbed by external disturbances. Applications in onboard flow measurement and disturbance detection & rejection are being explored. |
| 14:20 | Hesam Araghi
| Neuromorphic Machine Vision An event-based camera captures the illumination changes and outputs them as sequences of events, allowing for high temporal resolution and low power consumption. Many of the good-performing algorithms rely on first converting the events to the frames, and then applying standard computer vision methods such as CNNs. However, these methods neglect the sparse nature of the events, resulting in less efficient algorithms with high latency. Graph neural networks (GNN) enable direct processing of the events thanks to their capability to handle irregularly structured data. Hence, this project focuses on developing computationally efficient algorithms by proposing novel and online spatiotemporal GNNs techniques. |
| 14:40 | Anton Bredenbeck
| Tactile-Based Control for Aerial Robots Biological manipulator systems, such as the human hand, showcase superior performance with respect to versatility and dexterity compared to state-of-the-art mechanical manipulation systems. In this work the objective is to develop bio-inspired, compliant limbs that act as sensing and actuation tools for the aerial robot, enabling new navigation and control techniques; and enhancing manipulation capabilities with a focus on fragile and delicate objects. |
| 15:00 | Aurora Micheli
| Efficiency and self-organized criticality in SNNs Spiking Neural Networks (SNNs) are artificial neural networks that more closely mimic biological neuronal functionalities: by processing visual information with binary, sparse and precisely-timed events (spikes), SNNs can process information faster and more efficiently when compared to traditional ANNs, and are thus ideally suited for processing spatio-temporal event-based information from neuromorphic sensors. However, SNNs are still difficult to train, mainly owing to their complex dynamics of neurons and the non-differentiable nature of spike operations. This project aims to address the issue of efficiency and activity normalization in large-scale SNNs, by making use of the theoretically well established phenomenon of self-organized criticality. |
| 15:20 | Chaoxiang Ye
| Tactile Perception and Manipulation with Drones Nowadays, object perception and manipulation with drones are mainly based on visual feedback. However, the working environment of the perception components of a drone is very complicated. Tactile feedback can directly perceive some physical properties of objects (such as hardness, roughness, and temperature) and can therefore improve the perception and manipulation precision in harsh environments such as visual occlusion and insufficient light. |
| 15:40 | Jane Ramirez
| Biomorphic Drones with Multi-modal Locomotion Multimodality enables robots to overcome limitations of single locomotion modes by executing appropriate transitions between different modalities. Excellently synergized in nature, organisms can move, live, and reproduce in challenging environments man-made robots have only dreamt to thrive in. With biomorphic methodology, this dissertation aims to conceptualise, design, implement, and test an arboreal-aerial robot that can interact with its environment. Adaptive technologies will be utilised to achieve hybrid compliance. In the future, this robotic platform may be applied to search and rescue, and real-world ecological and weather monitoring in unstructured environments. |
| 16:00 | Chengming Feng
| Object Detection using Neuromorphic Systems in Drones Event cameras are well-known for high dynamic range, high temporal resolution, and low power consumption. However, we are still facing challenges of applying event data on some computer vision tasks such as object detection and object tracking due to the sparsity of events and the absence of diverse event-based datasets. Currently, I am working on: 1) collecting a novel ego-centric event-based dataset for the purpose of object detection, object segmentation, and action segmentation; 2) explore the data augmentation of events. |
| 16:20 | Liming Zheng
| Biomorphic Drones for Ecological Monitoring Forests and their biodiversity enable human life on Earth. Yet our relationship with nature is broken with forests and biodiversity being lost at alarming rates. It is vital that we learn how to protect and conserve these forests, while being able to sustainably exploit them for our demands. So far, we have not managed to do so, as we lack data from within these ecosystems for holistic understanding. With the development of electronic technology, soft material, vision, control and perception technology, drones have become a low-cost, flexible, and an efficient alternative for forest ecological monitoring. However, multi-rotors have some inherent shortcomings, such as high noise emissions and low endurance. Therefore, in this project I will focus on the design and control of a novel fixed-wing drone inspired by forest dwellers, addressing challenges in noise emission and endurance. |
| 16:40 | Coffee Break | |
| 17:15 | End of Programme | |







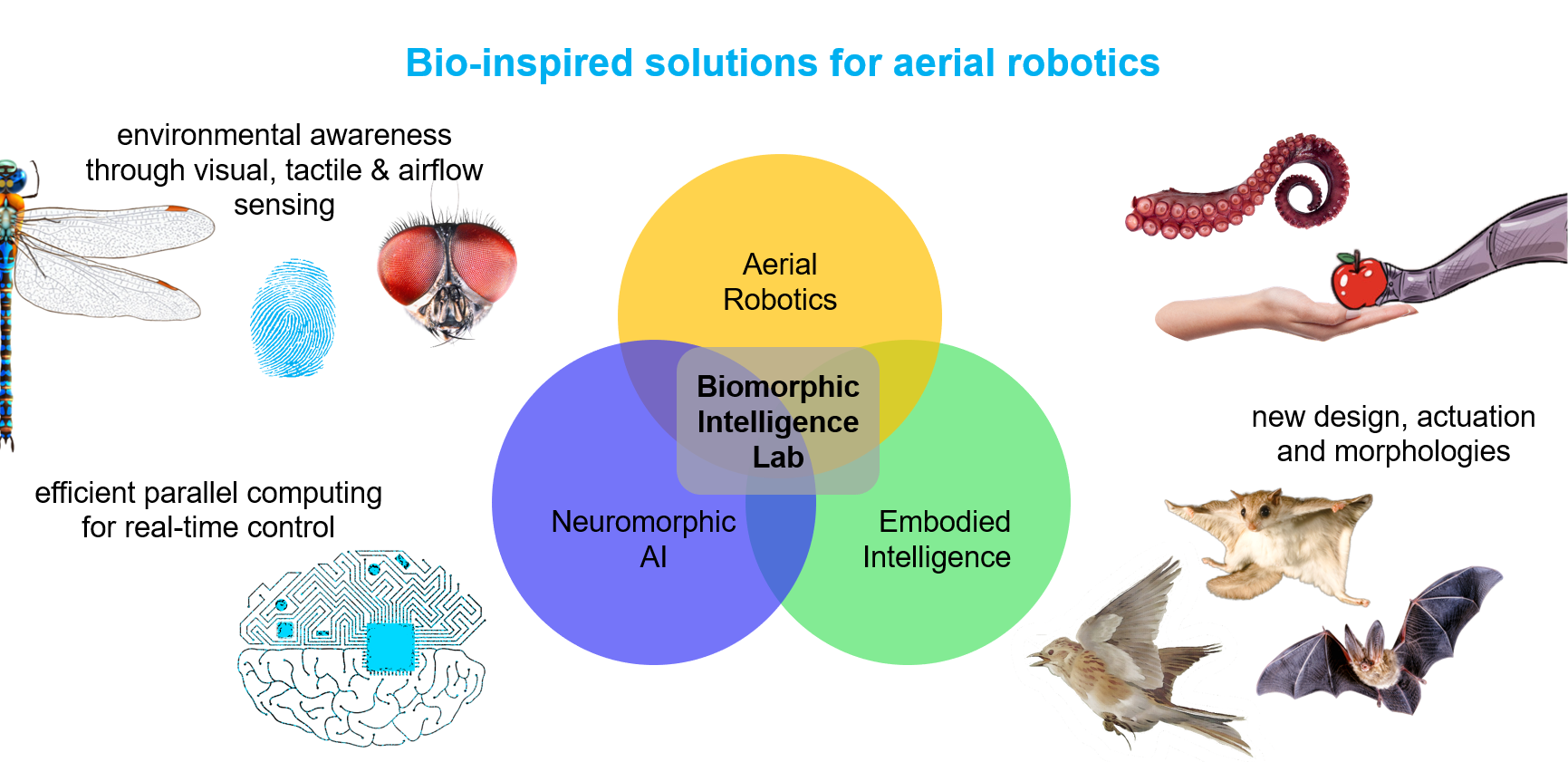
The BioMorphic Intelligence Lab is one of TU Delft’s Artificial Intelligence Labs. It researches biologically inspired solutions for aerial robotics. Researchers and PhD students at the lab are improving the performance of drones by developing drones that can actually sense, think and act. The lab is pioneering research in bio-inspiration that is concurrently implemented in the body (morphology), the sensing apparatus and the behaviour (control) of interacting drones, bringing to life a fresh perspective to the aerial robotics research field.
More information:
- Dr. Salua Hamaza, Assistant Professor at the Section of Control & Simulation, and one of the Lab’s Director.
- More information: BioMorphic Intelligence Lab website