
Robotic 3D Printing
Robotic 3D Printing
A new method to fabricate 3D models on a robotic system equipped with multi-axis motion
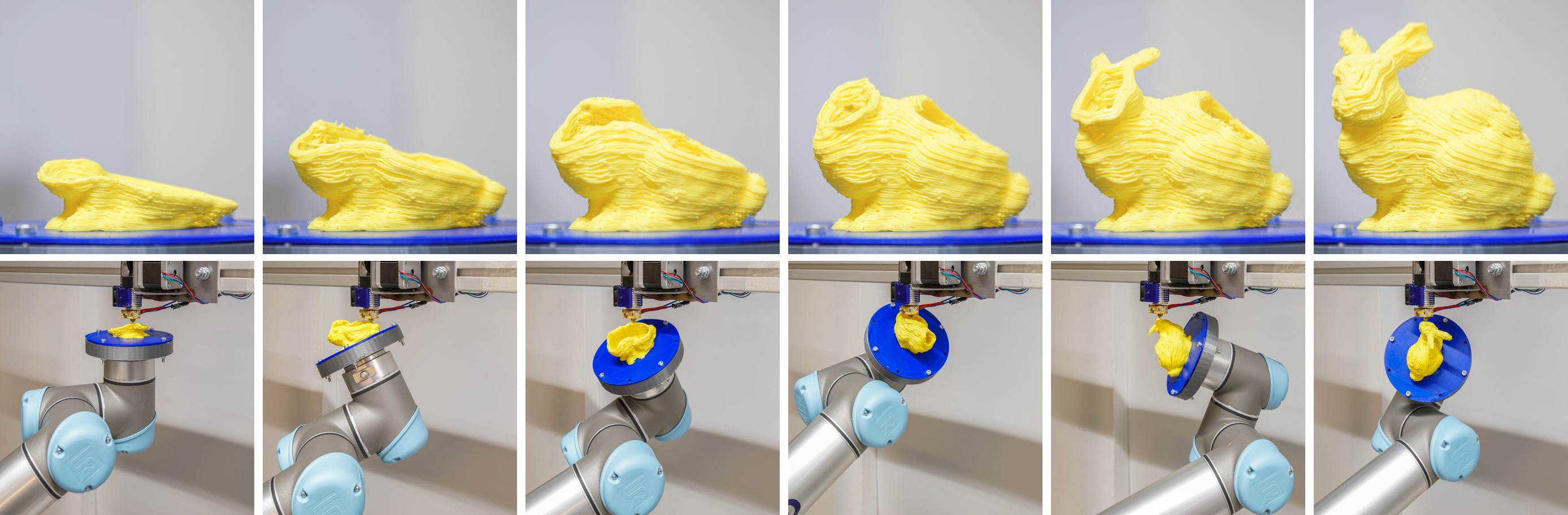
The goal of the project is to fabricate 3D models on a robotic printing system equipped with multi-axis motion. Materials are accumulated inside the volume along curved tool-paths so that the need of supporting structures can be tremendously reduced, if not completely abandoned on all models.
Currently most commercial 3D printing systems are printing in a 2.5D manner, materials are accumulated layer upon layer in planes along a fixed printing direction. This method requires addition of supporting structures below overhangs.
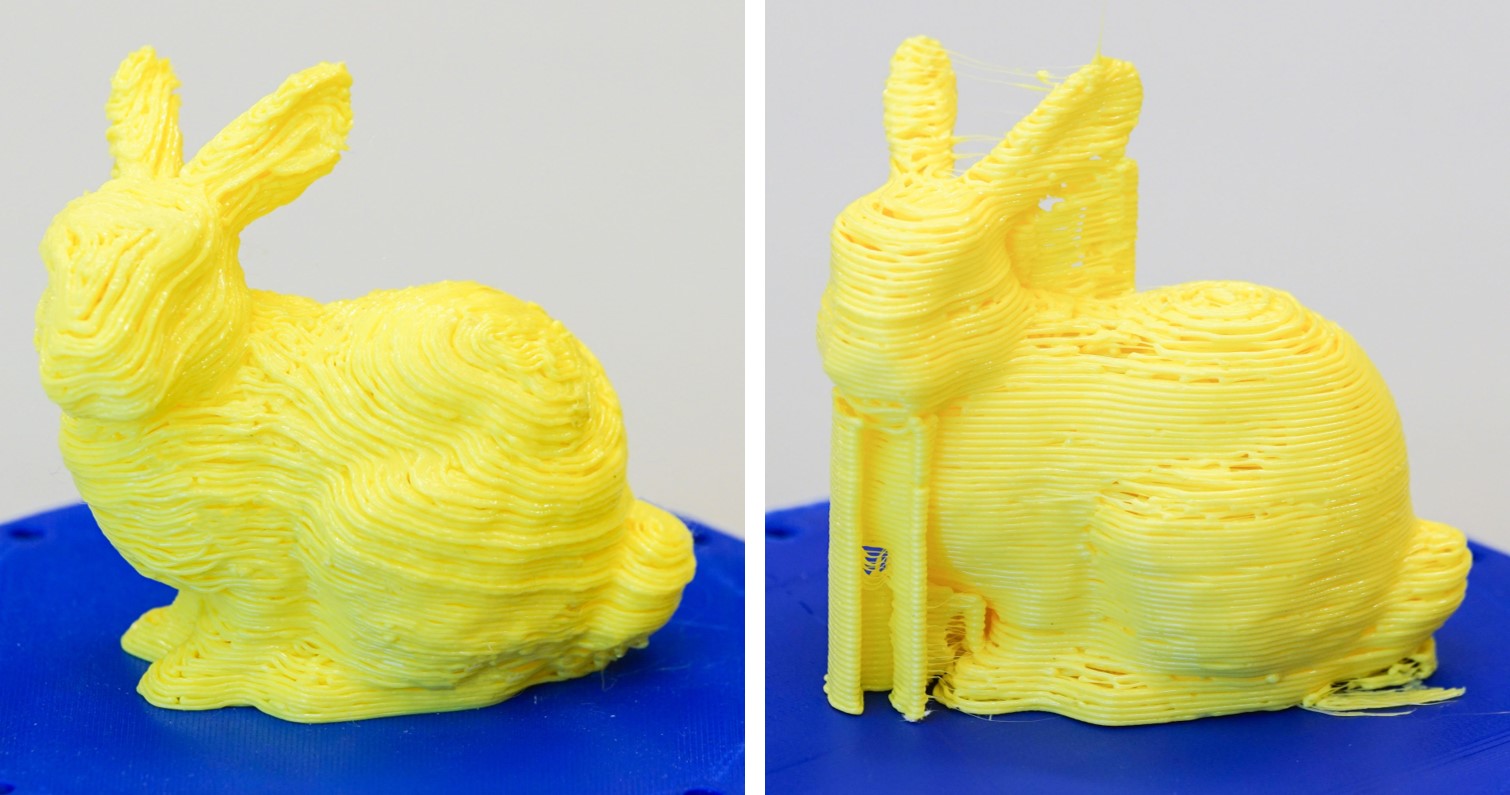
The use of robotics provides additional degree-of-freedom (DOF) in motion so that the direction of material accumulation can be changed during fabrication. The team used a FDM hardware system with multi-axis motions provided by a robotic arm to fabricate solid models according to the 5DOF 3D printing tool-paths generated by an algorithm. The most challenging part of this system is how to efficiently and effectively compute the feasible sequence of material deposition so that the fabrication can be performed in a support-free way.

The results of the experimental tests are very encouraging. Models with large overhangs and high-genus topology can be successfully fabricated by the 5DOF 3D printing system without any supporting structures. We believe that the tool-path generation algorithm will be widely used in 5DOF 3D printing systems to enable a variety of new applications.
Watch videos
Researchers
C. Dai, C.C. Wang, Chenming Wu, Sylvain Lefebre, G. Fang, Yong-Jin Liu
Publications
Dai, C., Wang, C. C. L., Wu, C., Lefebre, S., Fang, G., & Liu, Y-J. (2018). Support-free volume printing by multi-axis motion. ACM Transactions on Graphics, 37(4), 1-14. [134]. https://doi.org/10.1145/3197517.3201342
Tags: Robotics, 3D Printing, Fabrication, Tool-path generation
Research areas: Fabrication