
CoCoAS
Collaborating and coupled AGV swarms with extended environmental recognition
To be able to create multiple types and variants of products, modern production environments must transition from line-based manufacturing towards more flexible models. This applies to various sectors, including the automotive industry, where every model requires differentiated production steps because of the diversity of parts.
This project envisions a future with completely flexible production lines - where machines, products and parts either move or are moved automatically. However, the realisation of this vision is currently hampered by limitations in the size, shape and load capacity of vehicles, which results in the need for numerous specialised ones.
The CoCoAS project represents a significant step towards flexible smart factories, where automated guided vehicles (AGV) communicate and share environmental information in order to collaborate or connect with larger virtual vehicles. Once organised in a smart cyber-physical system, AGVs will enable greater levels of flexibility, overall system optimisations, and the ability to incorporate larger goods or machines (whether that be a body in white or an entire vehicle) into hyper-flexible assembly lines.
The CoCoAS project is structured around three objectives:
- Swarm intelligence design will be responsible for the optimisation of all transportation tasks in respect to environmental conditions and for vehicle replacements during recharging and breakdowns
- The use of extensive environment and obstacle recognition to orchestrate the collaboration of vehicles using state-of-the-art automotive grade sensors (e.g. multi-level laser scanners, radar detectors, etc)
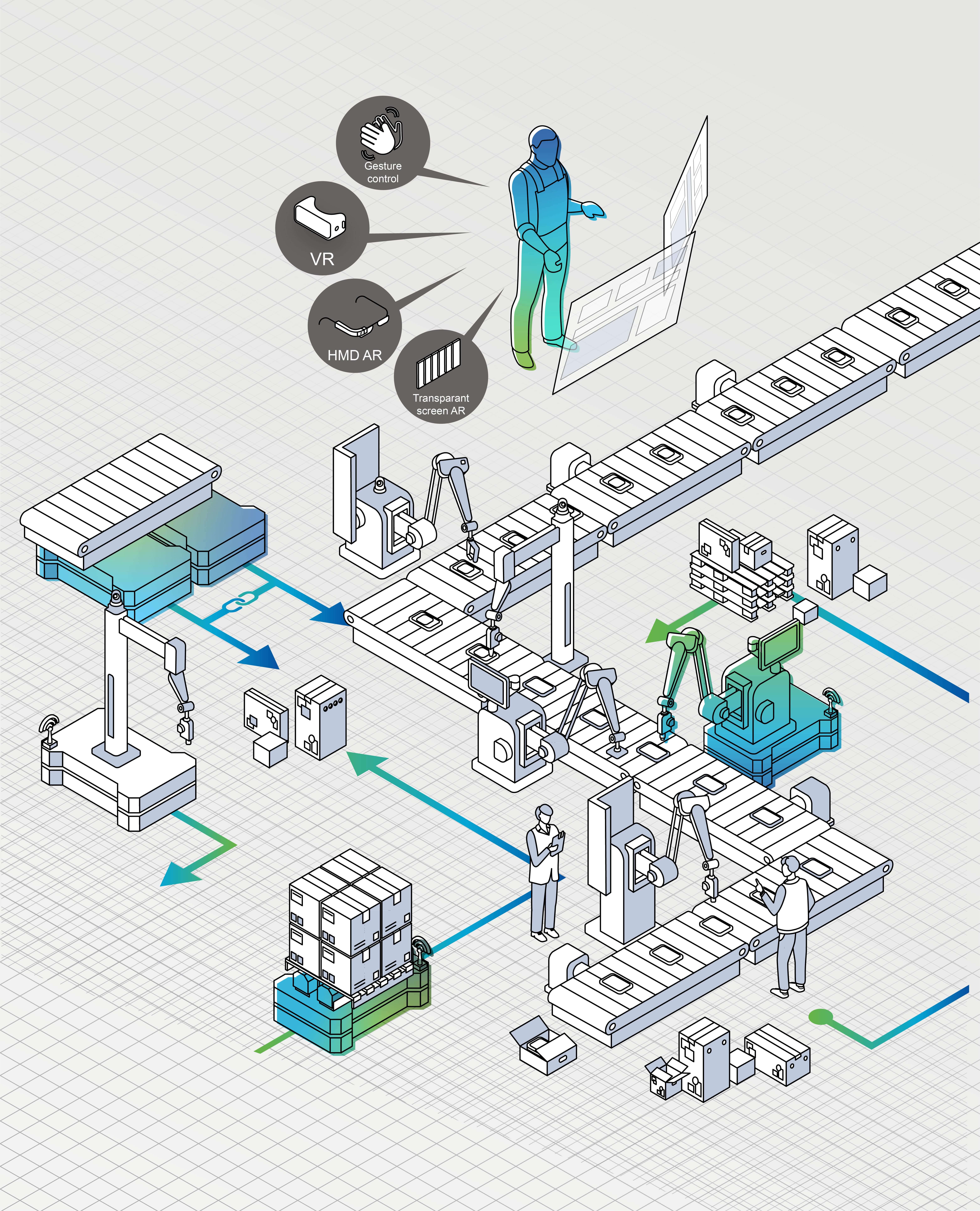
- The key role humans play in supervisory control. Human workers need to maintain an overview and be aware of what the system is doing and how to control it. This is a crucial component in an intelligent, self-adapting, smart-cyber physical system, which will likely be based around advanced visualisation and interaction techniques like augmented reality (AR).
The outcomes of this project will help to further develop closer human-robot cooperation within swarm intelligence enabled AGVs. More generally speaking, this project will contribute to the wider question of how to handle collaborations between human-to-robot, robot-to-human, and robot-to-robot. For example, some of the AGVs will be used to transport materials to the correct handling systems, while others, equipped with robot arms or loading mechanisms, will be responsible for the replenishment and handling of materials.
This project is part of KIC EIT Manufacturing, funded by the European Union.

Video


Zoltán Rusák
- +31 (0)15 27 89779
- Z.Rusak@tudelft.nl
- Publications
-
Room B-3-300

Adrie Kooijman
- 06-24542170
- 015-2781197
- A.Kooijman@tudelft.nl
- Publications
-
Room B-0-080
"The universe is big, it's vast and complicated, and ridiculous. And sometimes, very rarely, impossible things just happen and we call them miracles. And that's the theory. Nine hundred years, never seen one yet, but this would do me." - Doctor Who

Denis Zatyagov

Doris Aschenbrenner
- +31 (0)15 27 89523
- d.aschenbrenner@tudelft.nl
-
Room B-3-220
Available on: Mon-Tue-Wed-Thu-Fri
"There are 10 types of people in this world, those who understand binary and those who don't"

Neel Nagda
Partners:
- Magna
- TU Wien
- TU Delft
- CharismaTec
