Electroluminescence in future autonomous cars
Currently cars are developed and tested which can drive autonomously, i.e. without a human being which decides when to drive slower and when to stop. Such developments will have a severe influence on the in-city pedestrian to car communication.
In the current situation a pedestrian approaching a crosswalk looks at the car, estimates if it is slowing down or not and at the same time tries to get eye contact with the driver. The driver on the other hand slows down when he detects a pedestrian near the crosswalk and may even give a hand gesture to indicate that the pedestrian can cross. In the dark this communication becomes more difficult since the direct visual contact between driver and pedestrian is often not possible in those situations.

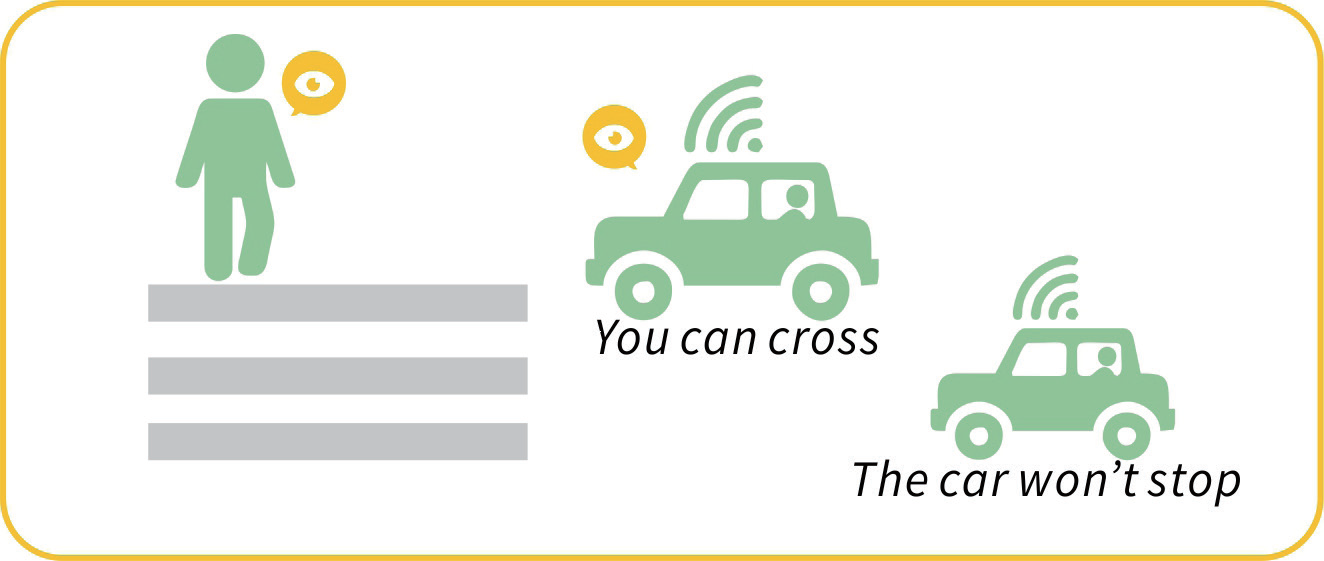
Fig 1+2: Examples of car to pedestrian communication
In case of autonomously driving cars the pedestrian to car communication may also be hampered, in particularly when it is dark. This can be because the pedestrian may not trust the car (did it really see me) and because the confirmation of the direct visual contact is missing (no hand waving or other signals). The result is a delay in the cross over action: the pedestrian waits until the car has really stopped and then crosses.
The current study focussed on finding a way to improve this pedestrian to car communication by using switchable electroluminescent signs which could be printed on the outer car surface. Electroluminescent paints are quite suited for this since they can be applied in any desired shape or pattern and (in principle) on any materials (i.e. both on metal parts and on the glass windows). The results are demonstrated for the Toyota E-palette concept car.

Kaspar Jansen
- +31 (0) 152786905
- k.m.b.jansen@tudelft.nl
-
Room B-3-170
Graduate student
- Qiaoge (Kristen) Qu
Researchers
- Prof. K.M.B. Jansen
- Ir. W.F. Kets (mentor)
- Dr. Sachin Kinge (company mentor)
In Cooperation with Toyota Motor Europe R&D
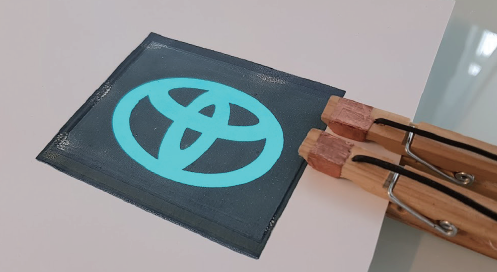
Fig.3: Preliminary experiment: Electroluminescent logo printed on paper
Proposed solution
We propose to print a pattern of EL figures on the front side of the car, partly extending to the side strips (Fig.4). The pattern consists of a steering wheel sign which indicates if it is in the auto-driving mode or not by the blinking of the three curves (1 in Fig.5). The indicator shows that it has detected the pedestrian by fully lighting the squares at the sides (2 in Fig.5). Next the car will show that it decelerates by subsequent lighting of the arrows in a downwards direction (3 in fig.5), followed by indicating that it is save to cross (4 in Fig.5) and the indication that it starts accelerating (upward directed arrows). A simulation of these activities is shown in Fig.6 below.

Fig.4: E-palette concept car with EL pattern
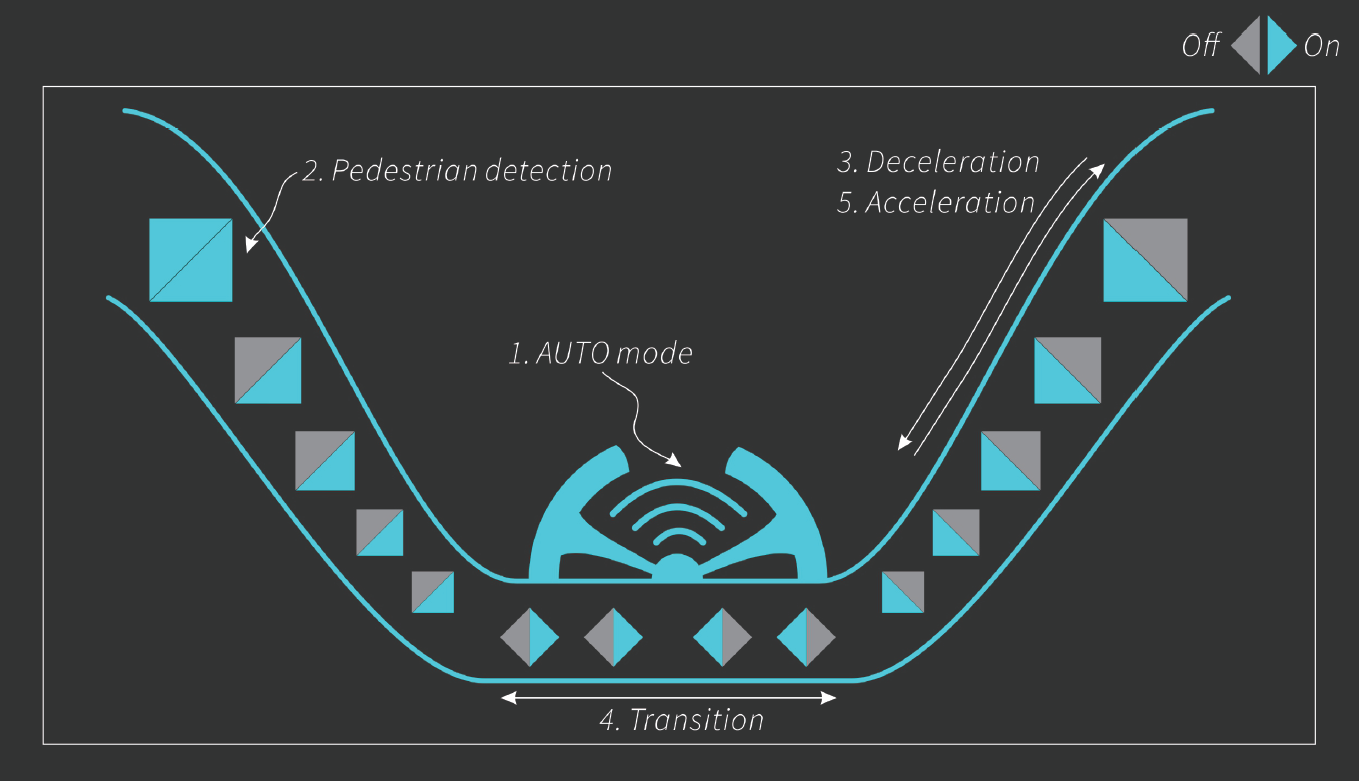
Fig.5: details of the proposed EL pattern
Fig.6: Simulation of EL lighting patterns
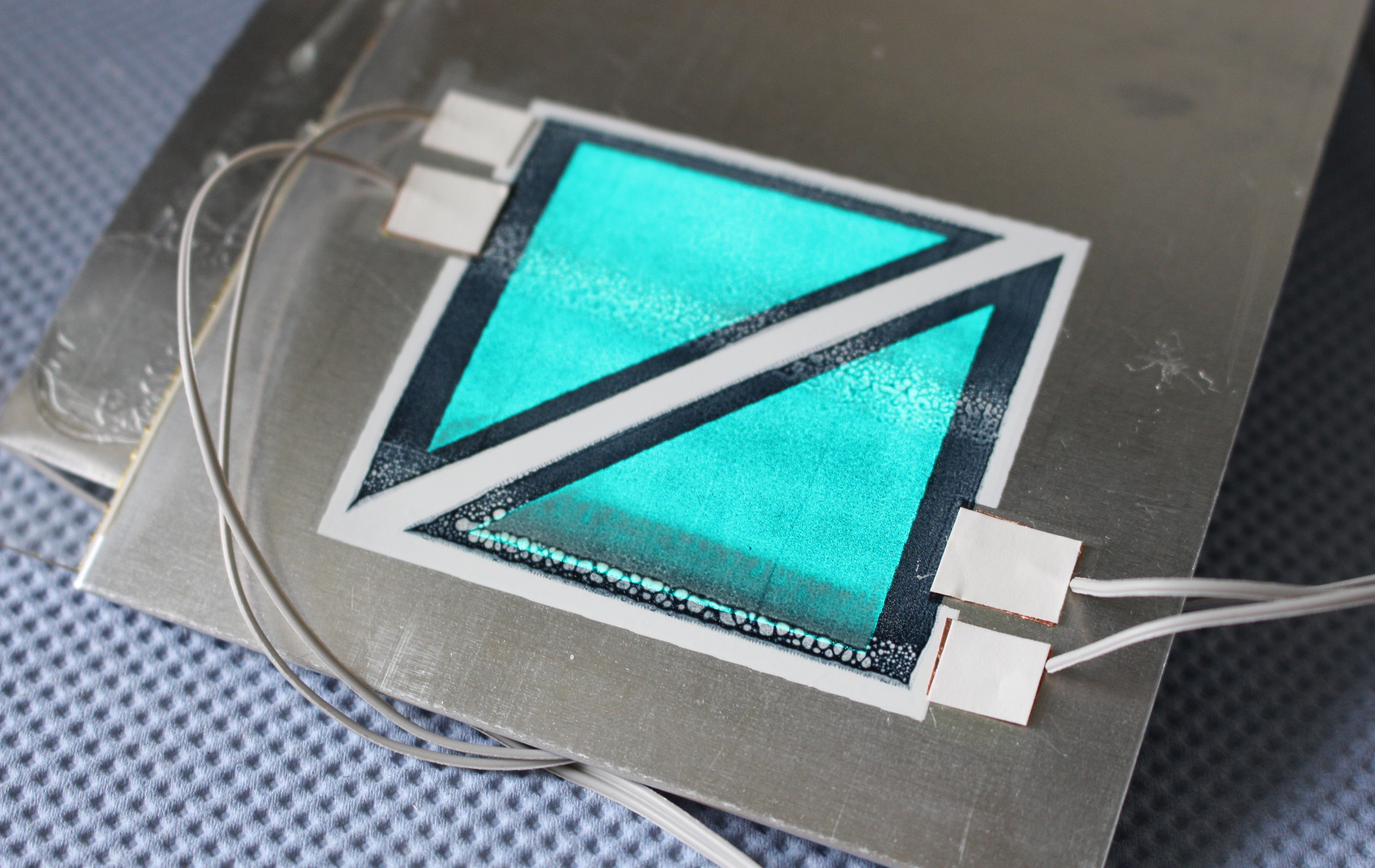
In order to show that this concept can actually be applied to metal and glass-like substrates, a prototype of a single triangle combination is made and shown in Figs.7+8.