
A 3D printed miniature valve to control the air and flow rate in pneumatic soft robotics. This design enables to control multiple bellows from inside the body of the soft robotic by only using one tube of air supply. The valves are actuated by Shape Memory Alloy (SMA) actuator wires, named Flexinol. The valves are PolyJet 3D printed together with the body of the soft robotic including the bellows. The vales used to control pneumatic bellows can be adapted to desired design parameters.
How does it work?
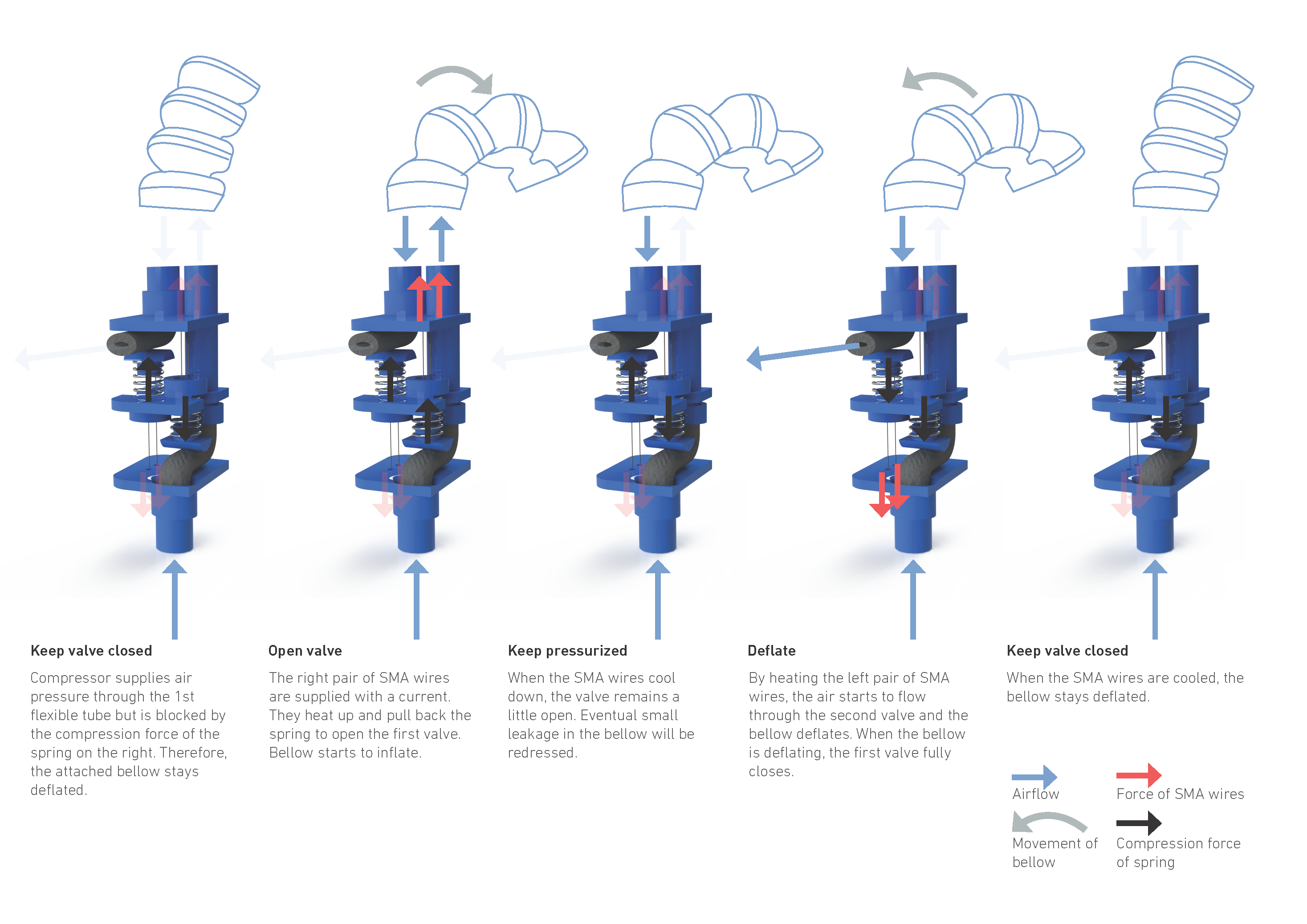
Each bellow is attached to two 3D printed flexible tubes. The tubes are pressed and closed by the compression force of a spring. The valves open when a small amount of current is applied to the SMA wires. The wires are heated and contract up to 4% of their length. This enable to valve to open. One valve controls the inflation of the bellow. The other valve controls the bellow to deflate. By changing the applied current to heat the wires, the bending speed of the bellows can be determined.
(click to enlarge)
Demonstrators
Two different demonstrators have been designed according to two different case studies. Both outcomes are used to be able to create the foundation of a tool which adapt the design of the valve to any desired design parameters.

This demonstrator consist of a single bellow acting as a robotic finger which can be used to create a pneumatic robotic hand.

This demonstrator consist of two bellows to create a walking robot. Both bellows can be controlled separately with only one inlet of air supply.
Tool to control any kind of soft robotics
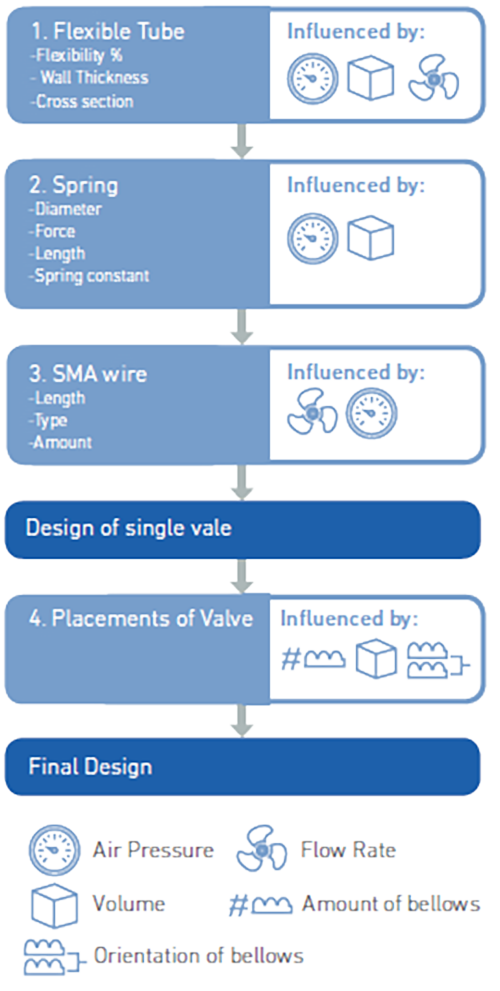
In the future, a tool can be created which determines the ideal design of the valves with variations in the parameters: Volume, air pressure, flow rate, amount of bellows and orientation of the bellows.

Kaspar Jansen
- +31 (0) 152786905
- k.m.b.jansen@tudelft.nl
-
Room B-3-170
Graduate Student
- Bas Smit
Committee
- Chair: Prof. K.M.B. Jansen
- Mentor: Ir. Scharff R.B.N.