Freeform Manufacturing
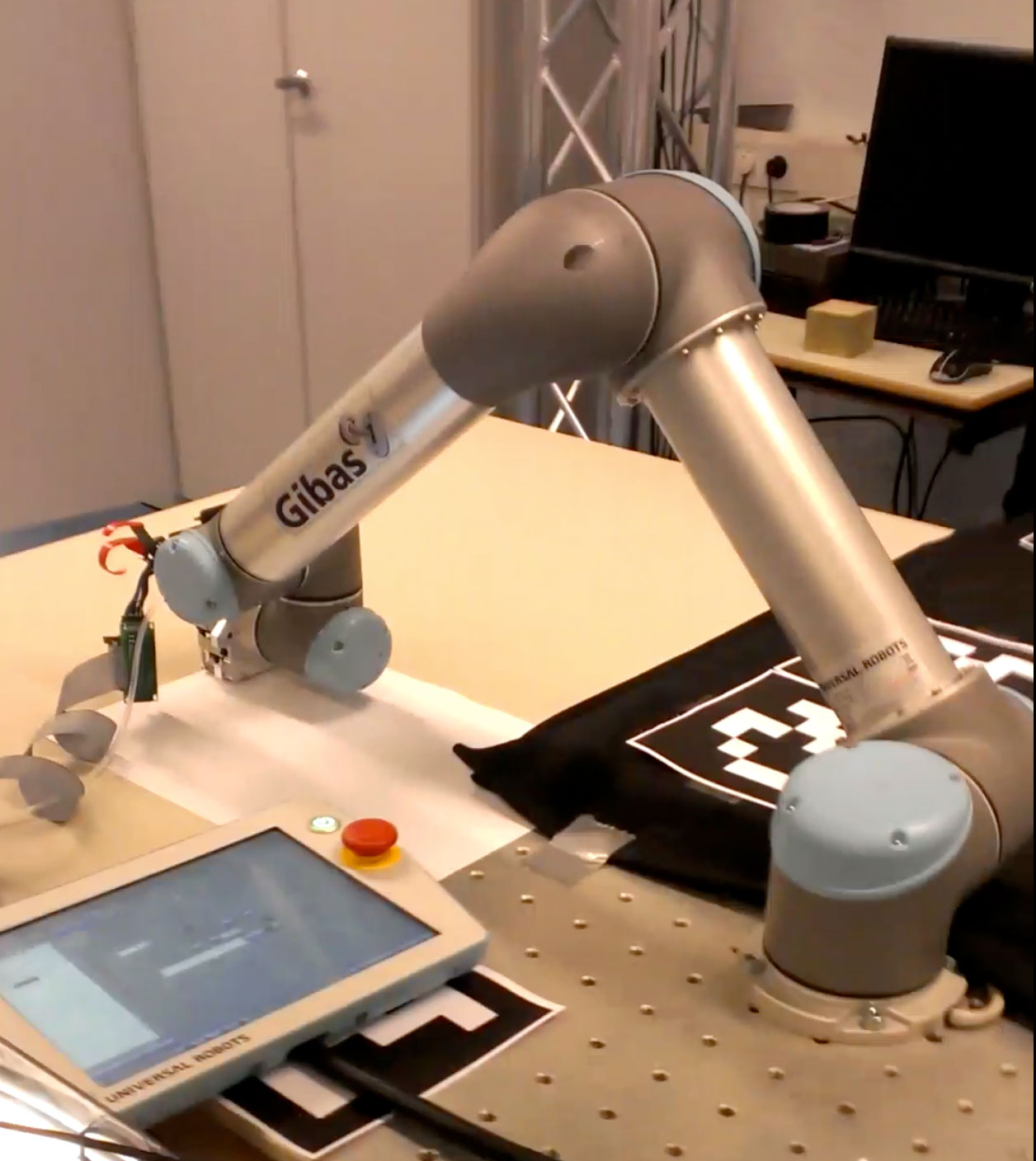
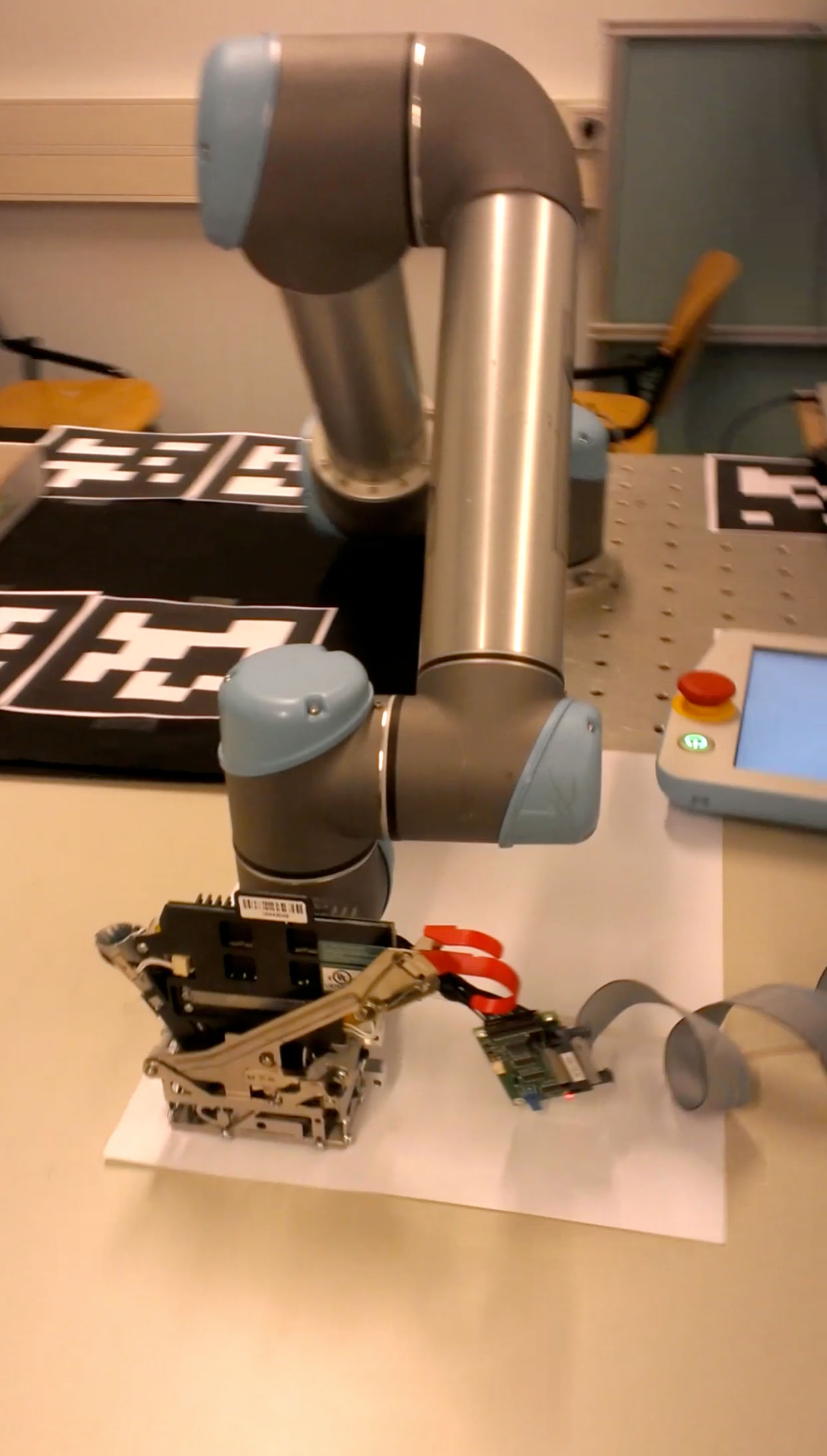
In this project we use a robotic arm and an off-the-shelf printhead. The key challenge is to generate an adaptive printing strategy, depending on:
- real-time scanned surface
- intended material composition
- printhead resolution/width
- robot speed/control
Initial print runs on non-planar surfaces are promising – we reach a high resolution in single-curved surfaces in real time.
Goals of the project
Not everything in the world is flat – how can we deposit material on curved surfaces? In this project we aim to automatically to extend functionality and aesthetics of curved shapes.
2D printing is not just for decoration – with functional inks we can influence reflection/refraction/translucency and electric conduction. This presents new opportunities for designers, from localized on-demand manufacturing to reproducing cultural heritage objects.

Jo Geraedts
"Things should be made as simple as possible, but not any simpler.” - Albert Einstein
Researchers
- Prof. Jo Geraedts
- Robert Babuska (ME)
- Mostafa Hajian
- Jeroen Kruit (graduate student)