Robotic Building Lab
The Robotic Building Lab aims to develop Design-to-Robotic-Production and -Operation (D2RP&O) methods that advance robotization in architecture. We are open to graduation projects from students and collaborations or proposals from researchers, both within and outside the faculty.
Approach
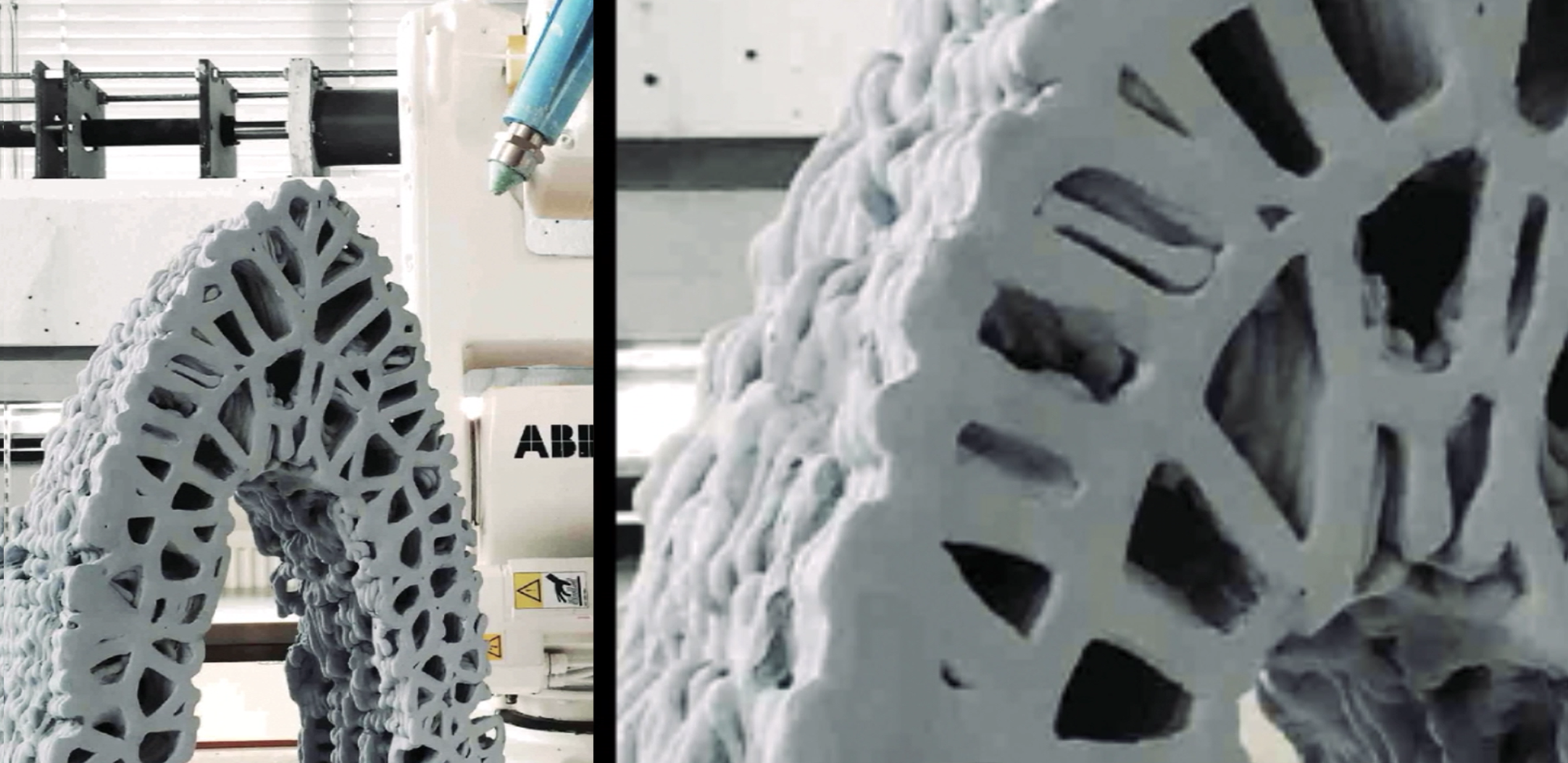
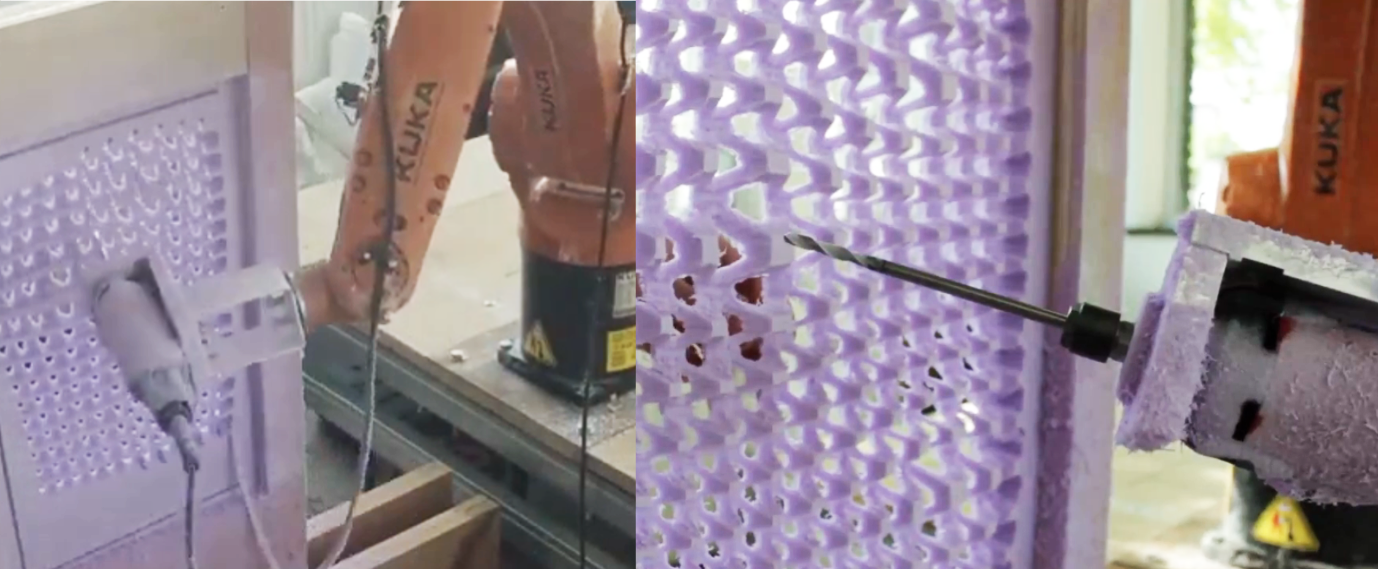
D2RP&O research and education activities are structured in additive, subtractive, and transformative workshops held in the lab. These workshops are aimed at integrating different modes and methods of robotic production and operation into computational design processes in order to explore multi-performative systems in architecture. Methods are developed for hybrid material systems, from micro to macro level, as spatial, structural and architectural configurations.
When environments incorporate sensor-actuator mechanisms that enable buildings to interact with their users and surroundings in real-time, their conceptualisation and materialisation process requires D2RP&O chains that link design to production and operation of buildings. In this context, design becomes process- instead of object-oriented, use of space becomes time- instead of program- or function-based, which implies that architects design increasingly processes, while users operate multiple time-based architectural configurations emerging from the same physical space that may physically or sensorially reconfigure in accordance with environmental and user specific needs.
See what’s possible in the Robotic Building Lab:
D2RP&O relies on interactions between human and non-human agents where the manufacturing plant, the building site and the buildings themselves operate as cyber-physical systems within the larger Internet of Things and People. In the end, users and environmental conditions contribute to the emergence of multiple architectural configurations.
Equipment
- 6-axis KUKA robot with subtractive and additive end effectors (hot wire, drilling and milling heads, extruder, etc.)
- Powerful computers with various software
- Kinect for motion sensing and various sensor-actuators.
More information
You can find the most up-to-date information about the Robotic Building Lab by visiting their website.
General information
Location:Room BG.West.230
(BK-LABs corridor in the west wing of the faculty)
Opening Hours:
Visits only on request