Een flinke afname in het aantal dodelijke verkeersongevallen. Het maakt professor Vaucher niet uit of dit komt door volledig zelfrijdende auto’s of door het op grote schaal introduceren van geavanceerde bestuurders-ondersteunende systemen. Uitgerust met door hem ontwikkelde millimetergolflengte autoradar technologie zullen auto’s veranderen in met elkaar communicerende robots die de omgeving waarnemen, interpreteren, en daar zonder tussenkomst van de mens op een verkeersveilige manier op reageren.

‘Bedrijven als Waymo en Tesla krijgen alle media-aandacht omdat zij aan volledig zelfrijdende auto’s werken,’ zegt Cicero Vaucher, professor in het Electronics Research Laboratory van de faculteit Elektrotechniek, Wiskunde en Informatica en gespecialiseerd in integrated millimetre wave front-end systems. ‘Maar volledig zelfrijdende auto’s zijn slechts de laatste stap in een continu proces ter verbetering van de verkeersveiligheid, aangedreven door het overdragen van steeds meer verantwoordelijkheid van de menselijke bestuurder naar de auto. Dit proces is zo’n vijf jaar geleden begonnen en begint nu echt zijn vruchten af te werpen.’ Het aantal dodelijke ongelukken in Nederland piekte in de jaren ‘70, met meer dan 3500 slachtoffers per jaar. De introductie van autogordels, en vervolgens de wetgeving die deze verplicht stelde, zorgde voor een sterke daling hierin. Het aantal slachtoffers daalt nog steeds als gevolg van de daaropvolgende introductie van elektronische systemen zoals het antiblokkeersysteem (ABS), de airbag en Elektronische Stabiliteits Controle systemen. ‘Dit waren eerst luxe accessoires, maar ze zijn nu ook verplicht,’ aldus Vaucher. ‘Ik verwacht dat de op dit moment nog optionele radar-technologie, zoals Adaptive Cruise Control en het geavanceerde noodremsysteem, over drie jaar ook verplicht zullen zijn. En dit is nog maar de eerste stap richting de verhoogde verkeersveiligheid die autoradar en zelfrijdende auto’s mede mogelijk zullen maken.’

Nog niet klaar om volledig zelfstandig te rijden
Bij dit eerste niveau van automatisering kan de auto tijdelijk het stuurwiel of het gaspedaal overnemen, terwijl de menselijke bestuurder hier ook de controle over behoud. Als samenleving hebben we ook al kennis gemaakt met het tweede niveau, waarbij de auto onder bepaalde omstandigheden zowel het stuurwiel als het gaspedaal volledig overneemt. Denk aan semiautomatisch inparkeren of automatisch filerijden. Er zijn zelfs bedrijven die het derde, semi-autonome, niveau aanbieden van volautomatisch op de snelweg rijden en inparkeren, waarbij volledige controle aan de auto is overgedragen. ‘Tot aan dit niveau is het wel zo dat de bestuurder onder alle omstandigheden eindverantwoordelijk is,’ legt Vaucher uit. ‘De bestuurder moet daarom te allen tijde alert blijven.’ Het vierde en laatste niveau, waarbij de auto onder veel verschillende condities volledige zelfstandig rijdt – waarbij de bestuurder kan lezen, werken of ontspannen – is nog niet commercieel beschikbaar. ‘De industrie is daar nog niet aan toe,’ zegt Vaucher, ‘en de wetgeving moet nog een inhaalslag maken. Het is immers nog steeds wettelijk verplicht om een alert reagerende bestuurder te hebben.’ Voor de grootschalige adoptie van alle niveaus van automatisering, en vervolgens de verplichtstelling daarvan, is het belangrijk dat de onderliggende technologie betaalbaar is. Bij de lagere niveaus van automatisering volstaat een handvol voorwaarts gerichte autoradars, maar bij de hoogste niveaus moet de auto met misschien wel twintig radars zijn uitgerust voor alle horizontale richtingen: voorwaarts, zijwaarts, achterwaarts en alles daartussen. ‘We zijn nu zo ver gevorderd dat de hardware kosten van zo’n geavanceerd radarsysteem ruim onder de duizend euro liggen,’ zegt Vaucher. ‘Een acceptabel prijsniveau voor topklasse auto’s, maar voor auto’s in de middenklasse en daaronder is een verdere prijsdaling waarschijnlijk gewenst.’
Het integreren van millimeter golflengte radar in auto’s leidt tot een grotere verkeersveiligheid en een afname in dodelijke verkeersongevallen.
Millimeter golflengte radiosignalen
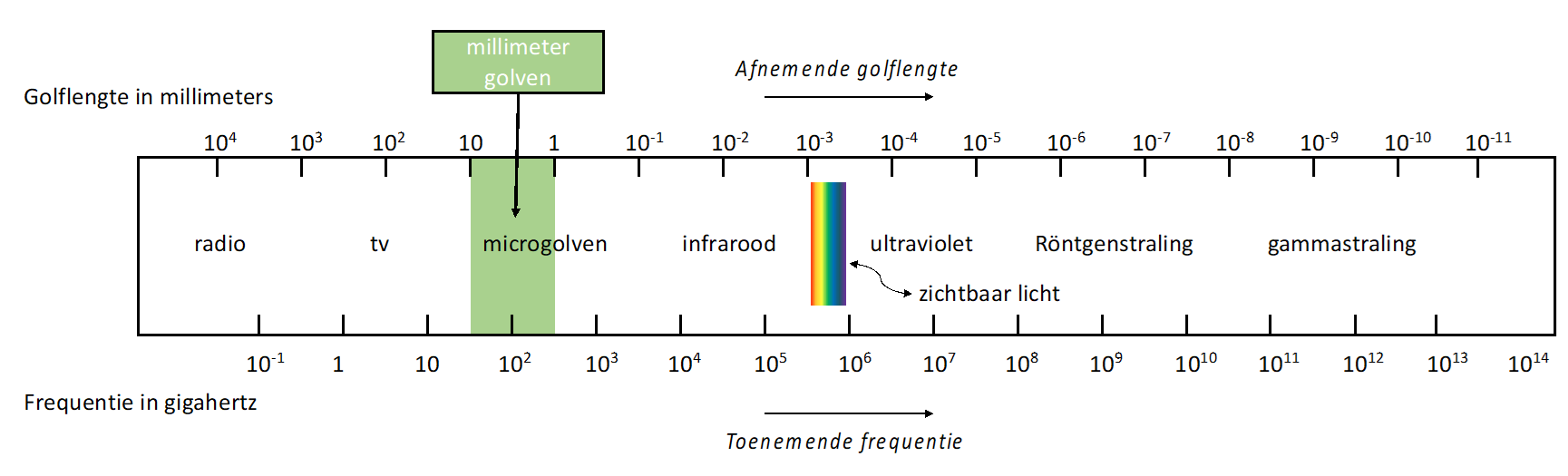
Millimeter golven zijn radiogolven die, net als zichtbaar licht, onderdeel uitmaken van het elektromagnetisch spectrum. Alle elektromagnetische golven bewegen zich voort met de constante snelheid van het licht, ongeveer 300.000 kilmeter per seconde. Het is daarom de frequentie van deze golven die hun golflengte bepaald. Radiogolven met een frequentie tussen de 30 GHz en 300 GHz (1 GHz = 1 gigahertz = een miljard oscillaties per seconde) hebben, respectievelijk, een golflengte van 10 millimeter (1 centimeter) en van 1 millimeter. Zichtbaar licht heeft een golflengte die zo’n tienduizend keer kleiner is.
Kleiner dan een pasfoto
Autoradar maakt gebruik van een zogenoemd chirp-signaal, waarbij de frequentie van het uitgezonden radarsignaal lineair toeneemt over de tijd. De radar zendt elke seconde tienduizenden van deze chirps uit, telkens met een korte pauze daartussen. Door de frequentie van het teruggekaatste signaal te vergelijken met het (op dat moment) uitgezonden signaal kan de radar binnen slechts enkele milliseconden zowel de afstand tot en de snelheid van objecten bepalen. ‘Hedendaagse autoradar systemen maken gebruik van radiosignalen met een zeer hoge frequentie, die daardoor een golflengte van slechts enkele millimeters hebben,’ legt Vaucher uit. ‘De drievoudige afname in golflengte in vergelijking met oudere systemen, in combinatie met de grotere beschikbare bandbreedte bij deze hogere frequenties, biedt veel voordelen. We kunnen hierdoor de afstand en snelheid van objecten met een veel hogere resolutie bepalen. Daarnaast hebben we ook de afmetingen en het energieverbruik van de radar drastisch kunnen reduceren.’ Hij toont de huidige state-of-the-art op het gebied van autoradars, zoals hij en zijn team die hebben ontwikkeld bij NXP Semiconductors. Het complete radarsysteem bestaat uit twee minuscule chips, drie radarzenders en vier radarontvangers. Dat alles op een printplaat kleiner dan een pasfoto. ‘Dit is zelfs in kleine auto’s onzichtbaar te integreren,’ zegt Vaucher. ‘En dit ene product is geschikt voor alle niveaus van automatisering. De moeilijkheid bij millimeter radiogolven is het ontwikkelen van de technologie om deze hoge frequenties te bereiken. Zodra je die hebt, heeft het een enorm potentieel.’

Het is bij zelfrijdende auto’s essentieel dat sensoren elkaar niet alleen aanvullen maar ook in functionaliteit overlappen. Zo zal een zelfrijdende auto nog steeds veilig zijn als een bepaald subsysteem defect raakt.
Weer of geen weer
Radar alleen is niet de oplossing. Meerdere technologieën, elk met eigen voor- en nadelen, dragen bij aan het vergroten van de autonomie van auto’s en van de verkeersveiligheid. ‘Ik ben ervan overtuigd dat radar en optische camera’s elkaar optimaal aanvullen,’ zegt Vaucher. ‘Een camera heeft een hele hoge resolutie voor het detecteren van objecten, maar heeft moeite met het bepalen van hun afstand en relatieve snelheid. Dat is precies waar een radar zeer goed in is. Radar kan weer geen verkeersborden lezen, wegmarkeringen zoals doorgetrokken lijnen zien of de kleur van een stoplicht of achterlicht bepalen. Daar staat weer tegenover dat radar (vrijwel) geen last heeft van mist, hevige regen of het vallen van de nacht.’ De functionaliteit van beide systemen overlapt weer met die van het veelgebruikte LiDAR (Light Detection and Ranging) systeem. Voor een maximaal gezichtsveld bevindt dit systeem zich typisch bovenop een auto. Hiervandaan zendt een roterende laser elke seconde miljoenen infrarode lichtpulsjes uit. Door van elke pulsje de tijd te meten tussen uitzending en ontvangst bouwt het systeem een beeld van de omgeving, met een behoorlijk hoge resolutie. Sommige LiDAR systemen kunnen zelfs de relatieve snelheid bepalen van wat ze zien, maar ze zijn duur en hun operationele betrouwbaarheid is nog niet bewezen. ‘Het gaat er ook niet alleen om dat de systemen elkaar aanvullen,’ legt Vaucher uit. ‘Hoe meer verantwoordelijkheid we naar de auto overdragen, hoe meer redundantie we willen inbouwen.’ Zulke meervoudige functionaliteit betekent dat een zelfrijdende auto nog steeds veilig is, zelfs als een bepaald subsysteem defect raakt. ‘Met ons onderzoek willen we de hoekresolutie van autoradar wel degelijk zo ver vergroten dat het in principe LiDAR kan vervangen,’ vervolgt Vaucher. ‘Maar het is aan de autoproducent om voor de gewenste mate van redundantie te kiezen. Misschien is het implementeren van zowel autoradar als LiDAR wel het beste.’

Het CRUISE-project
Het vergroten van de hoekresolutie van autoradar is een van de uitdagingen binnen het CRUISE-project, een onderzoekssamenwerking tussen TU Delft en NXP Semiconductors. Vaucher is bij beiden in dienst. ‘Het project is gericht op uitdagingen waarvan we weten dat we die gaan tegenkomen,’ zegt hij. ‘We voorzien bijvoorbeeld nu al de noodzaak van radarsystemen waarbij je met meerdere zenders tegelijk metingen kan doen.’ Bij “eenvoudig” gebruik van de chip van pasfoto formaat is een hoekresolutie van 36 graden mogelijk. Dit komt erop neer dat je het menselijk gezichtsveld opsplitst in slechts vijf pixels. ‘Hiermee kan je een aankomende vrachtwagen detecteren, maar niet de motorfiets die de vrachtwagen op dat moment inhaalt,’ legt Vaucher uit. ‘Maar dankzij de innovatieve antenne lay-out, in combinatie met slimme digitale signaalverwerking, is een driemaal zo hoge resolutie mogelijk middels een proces genaamd beamforming.’ Om de inhalende motorfiets goed te kunnen zien, moet de hoekresolutie met nog eens een factor tien toenemen, tot een enkele graad. ‘We weten dat we dat kunnen bereiken, en zelfs een nog hogere resolutie, door vier van deze radarchips te integreren op een enkele printplaat. De moeilijkheid zit hem erin dat alles tegelijk moet kunnen zenden en ontvangen. Interferentie bemoeilijkt dit.’
Het is van groot belang om interferentie van autoradar te terug te dringen omdat dit anders een showstopper kan zijn voor het ontwikkelen van zelfrijdende auto’s.
Interferentie aanpakken
De sensoren voor autoradar hebben een beperkte bandbreedte tot hun beschikking. Integratie van deze radars in steeds meer auto’s zal daardoor tot een toename aan interferentie leiden. Hierdoor is het mogelijk dat de radars bepaalde objecten niet continue kunnen volgen of zelfs in het geheel niet opmerken, wat tot onveilige verkeerssituaties kan leiden. ‘Dit zou zelfs een struikelblok kunnen zijn voor de ontwikkeling van zelfrijdende auto’s,’ ligt Vaucher toe. ‘Binnen het CRUISE-project onderzoeken wij nieuwe mogelijkheden om interferentie te beteugelen. Denk bijvoorbeeld aan het onderscheiden van verschillende signalen door deze te coderen.’ Zelfs het krachtige lineaire chirp-signaal is bij deze zoektocht naar betaalbare hoge-resolutie autoradar niet heilig. ‘We werken nauw samen met experts in radarsignaalverwerking binnen de TU Delft, zoals professor Yarovoy van de Microwave Sensing, Signals and Systems groep. We willen een nieuwe golfvorm voor het chirp-signaal ontwikkelen, eentje die minder gevoelig is voor andere radars of zelf-interferentie. Binnen het Electronics Research Laboratory hebben we de kennis om vervolgens de elektronische circuits te ontwikkelen die deze signalen kunnen produceren en weer ontcijferen. Autoradar is een boeiend multidisciplinair probleem en het is heel belangrijk dat chipontwerp en signaalverwerking nauw aansluiten.’
Sensorfusie voor optimaal gebruik van radarbeelden
Er zijn nog meer wetenschappelijke disciplines nodig, bijvoorbeeld voor het interpreteren van de verwerkte signalen. De radar produceert veel informatie; de afstand tot een groot aantal objecten, hun relatieve snelheid en onder welke hoek ze zich bevinden ten opzichte van de auto. Maar niet wat voor object het is. De kunstmatige intelligentie voor het interpreteren van beelden van op de auto geplaatste optische camera’s zal zeer waarschijnlijk ook nodig zijn voor het verwerken van de radarbeelden. ‘Nog belangrijker is het combineren van de informatie die van de verschillende sensoren komt,’ aldus Vaucher. ‘Alleen dan kan de auto optimaal reageren. Een camera kan een bepaald object als voetganger bestempelen. Maar op basis van het verschil in snelheid tussen benen en torso kan de radar aangeven dat het mogelijk een fietser betreft, of iets geheel anders.’

Een lange weg naar volledig zelfrijdende auto’s
Ondanks de zeer snelle ontwikkelingen in sensortechnologie en kunstmatige intelligentie is er nog een lange weg te gaan naar volledig zelfrijdende auto’s. In de Verenigde Staten vinden al testen plaats op snelwegen en in steden, maar volgens professor Vaucher zal het nog wel enkele jaren duren voordat ze commercieel beschikbaar komen. ‘De infrastructuur in deze steden – met hun brede wegen, geringe aantal voetgangers en vrijwel totale gebrek aan fietsers – is bijna ideaal voor de technologische ontwikkeling hiervan en, later, voor de commerciële introductie,’ zegt hij. ‘Het is een veel grotere uitdaging om met een zelfrijdende auto het centrum van Delft te trotseren, waar je op enig moment te maken hebt met wel tien voetgangers en vijftien fietsers.’ Dit nog los van de vele kleine bruggetjes, de met regelmaat veranderende verkeerssituaties, en het onvoorspelbare en niet altijd geoorloofde gedrag van de zojuist genoemde voetgangers en fietsers. Gevraagd of hij een van de eerste eigenaren van een volledig zelfrijdende auto zal zijn, antwoordt Vaucher dat ‘het gaat om fascinerende technologie die zal leiden tot een flinke stap voorwaarts in de verkeersveiligheid. Ik kijk ernaar uit.’
Tekst: Merel Engelsman | Portretfoto: Mark Prins
Meer verhalen