Photogrammetry and laser scanning
Within the Dept. of GRS, the Spatial Laser Scanning Lab develops methodology to efficiently extract geometric information on the state of our Earth and its infrastructure using notably different types of laser scanning data. Laser scanning efficiently samples the surface geometry of our urban and natural environment. LIDAR systems on tripods, cars, drones, planes and even backpacks and satellites are able to collect billions of 3D points in a few hours. The quality of such point clouds is characterized by combining sensor knowledge and geodetic data description techniques. What remains challenging is to automatically extract valid geometric information from these point clouds in a similarly efficient way. These algorithms are built using tools from fields like computational geometry and computer vision. Efficient implementation of the algorithms, both from a hardware and software perspective, is required to process point clouds at an operational level.
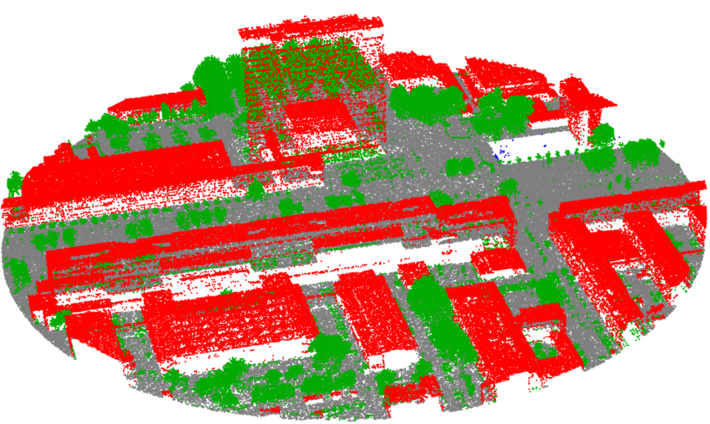
Laser-scanner generated point-cloud of the Mekelpark (part of the TU Delft campus)