Machines
Design of Soft Grasping Gripper with Actively Stimulated Particles
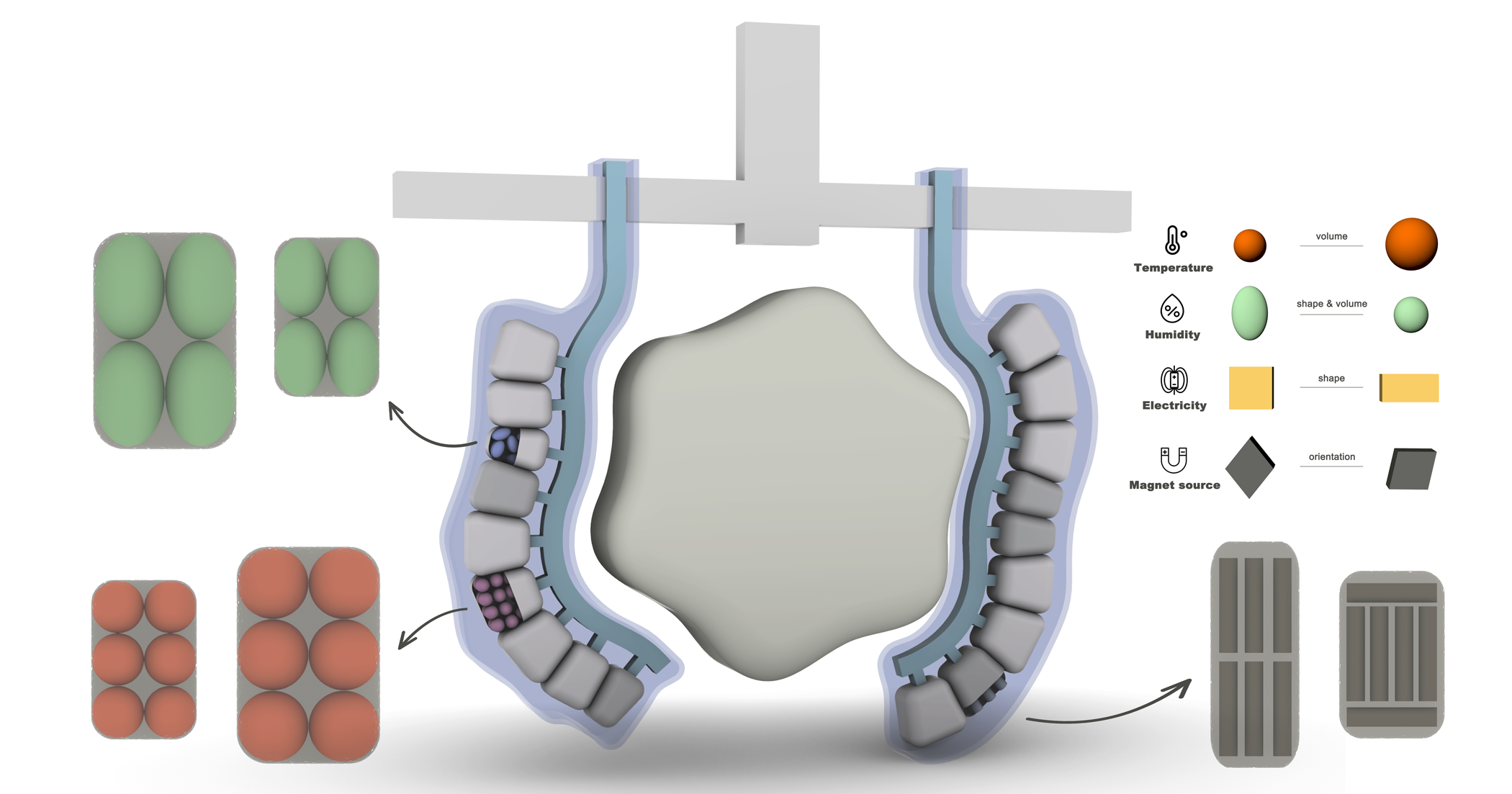
This project aim is to develop a design of a large-scale, variable stiffness and high-level adaptability novel versatile soft grasping gripper that can achieve tailored grasping tasks of complicated shaped and sized objects such as windmill blades and break bulk in ports. The design of the novel gripper is a complicated system engineering and many factors including the gripper structure determination, the selection of the smart materials, the design of the structures, and the mechanical control scheme needed to be considered. Thus the methodologies include the conceptual design of the structures, the numerical study on the smart materials and interactions between the particles and soft boundaries, the kinematics and dynamics analysis of the whole gripper structure, and the experimental validation of the system.
Currently I am focusing on the conceptual design. As shown above, The whole structure is supported by a straight frame like the human skeleton. In addition, different deformable elements will attach to the frame, the elements are individual but can interact with each other. Moreover, different types of particles with smart materials are filled in each element, which presents different deformations when variable external stimuli are employed. In the next step, a prototype with a specific reference size and structure will be conducted to demonstrate the feasibility of the soft actuator design. Specifically, the smart materials with properties that can be significantly changed in a controlled fashion by external stimuli are used for fabricating actively deformable particles or shrinking membranes Furthermore, the 3D printing technologies will be used for particle fabrication and smart textiles will be utilized for membrane fabrication.

Qianyi Chen
Design of an autonomous container handling system for interterminal barge operations
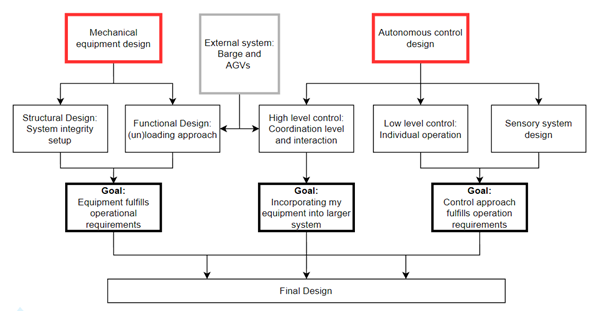
One of the biggest problems for barge logistics is the long waiting times present within the ports during peak times, which occur due to traffic congestions and the fact that ports prioritize large TEU numbers per vessel to decrease handling costs and efficiency. An approach which can increase the cost efficiency of barge logistics and resurrect widespread use of smaller vessels in shipping is a dedicated container handling solution which is focused on small barges and increase of efficiency through performance of rapid transshipment operations. The main goal of the project is to develop a conceptual autonomous container handling system that is focused on servicing small container barges under a kiss-and-ride principle of rapid barge throughput. The key aspects of developed system is to provide an autonomous transshipment solution that is not limited by a fixed operating location and is capable of reducing the amount of time that each container barge has to spend in an unloading zone, through increasing process efficiency of ship mooring, container positioning, cargo unloading and barge release. The main focus is on a small barges, which due to limited container carrying capacity fall into end of service queues within the ports. Figure 1 illustrates the main aspects of the project structured in terms of relevant research tasks. Current focus of the project is on conceptual generation and definition of the overall system operating principle, with a key purpose of developing the type of system that would be most suitable of performing rapid flexible container handling operation under a kiss-and-ride principle. This system is then to be verified in a simulation environment for its structural integrity and applicability for rapid container handling purposes, which is then moved forward towards detailing its grab positioning approach and control architecture. Finally system operation is to be validated in a laboratory environment on a scaled down model.
Skirmantas Pargalgauskas
Supervisory team
- Supervisor: Dr. Jovana Jovanova
- Promotor: Dr ir. Dingena Schott