Leg exoskeletons
Different exoskeletons and orthotic devices have been developed at DBL. See some historical projects of Herman van der Kooij's research group below.
Passive Exoskeleton Research
XPED Project
Can walking be more efficient? Models show that during walking energy is unnecessarily dissipated. If we can store the 'braking' energy and use it to power walking, our gait pattern can be more efficient. At the lab we are working on exoskeletons that are capable of doing this and let you walk more efficient. Find out how in one of our publications (click here) and see how it works in the movie.
This project is collaboration between the University of Twente and the Delft University of Technology.
Powered Exoskeleton Research
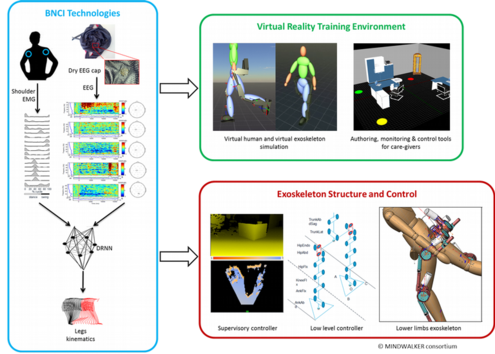
MINDWALKER - EU FP7 Accessible and Assistive ICT Project
Due to trauma or disease some people have lost the capability to control certain muscle and could not walk on their own anymore. A lack of mobility often leads to limited participation in social life. One possible solution is to use robotic device to support them and train them to regain the walking ability. MINDWALKER Exoskeleton has a pair of robotic legs, which utilize both bio-signal (EEG, EMG) and non-bio-signal (accelerometer, load cells and encoders) to move human legs in a natural way.
The purpose of this EU FP7 project is to conceive a system empowering lower limbs disabled people with walking abilities, which allows them perform their usual daily activities in the most autonomous and natural manner.
The project addresses 3 main different fields of expertise:
- BCI technologies
- Virtual Reality
- Exoskeleton Mechatronics and Control
The project top level objective is to combine expertise to develop an integrated MINDWALKER system. In addition the system shall undergo a clinical evaluation process. In the Netherlands, TU Delft is responsible for the mechanical design and mechatronics integration, while University of Twente is responsible for the balance and control of the exoskeleton.
SYMBITRON - EU FP7 Project
SYMBITRON targets a major technological leap for symbiotic man-machine interactions. In particular, the project results will markedly improve the lives of (partially) paralyzed persons through the development of a superior wearable exoskeleton. Such systems are designed to offer Spinal Cord Injured (SCI) patients the ability to walk and overcome obstacles in their daily life. To date, wearable exoskeletons still fall short of achieving this ambitious goal, and the will to bridge the gap forms the drive behind this project. The consortium has been assembled based on the partners' key scientific and clinical competences and long-standing experience in the field of man-machine interaction, as well as their excellent infrastructure and access to a large pool of SCI patients. The central approach is unique within the research field, owing to its patientcentred design, which results in a fully customized solution that complements the unique remaining capacities of each individual patient. We will also be the first to replicate physiological neuromuscular functionality in an exoskeleton, while at the same time seamlessly integrating residual human functionality (muscle characteristics, reflexes etc).
This concept will restore the bi-directional interaction between paralyzed body parts and the rest of the body. Based on this fundamental concept, the main objectives in SYMBITRON are (i) to develop a safe, bioinspired, personalised wearable exoskeleton that can flexibly complement any remaining walking function in SCI patients, allowing them to walk without additional assistance, (ii) to develop a training environment and training protocols for SCI patients and their clinicians, and (iii) to provide clinical proof of concept for safety and functionality of the system. The four-year project encompasses 7 work packages, and it is shaped to maximise impact on patients’ quality of life, on societal spending, and on general understanding of symbiotic man-machine interaction.
Evryon - EU FP7 Embodied intelligence ICT Project
Design is craftsmanship. Although heavily aided by computer, it is still the human who makes the most important design decisions. In the Evryon project we like to break this dogma. In this project we develop a new strategy where exoskeletons are designed entirely by a computer. Simulations and optimizations of the mechanics and control methods leads to the best exoskeleton layout.
The goal of the Evryon-project is to develop a novel approach for the design of Wearable Robots (WRs) that can be used for applications such as rehabilitation, assistance, human augmentation and more. The project focuses on generating mechanical structures by optimization.
Simulation of human walking
One of the project achievements was a 2D simulator where the interaction between the exoskeleton and its user can be modeled.
Pneumatic Ankle Foot Orthosis
As part of the Evryon-project, an pneumatic ankle foot orthosis (AFO) is developed. The orthosis is powered by a pneumatic muscle. The orthosis functions as a platform to test different control strategies.