Statically balanced arms
Delft Arm
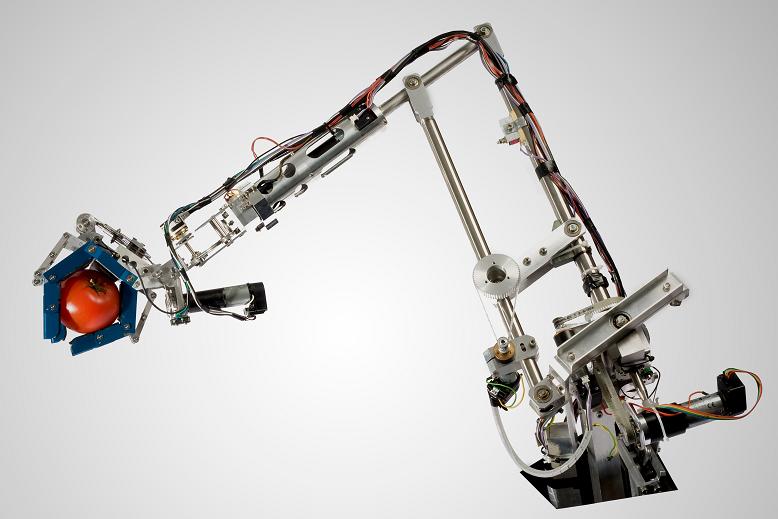
We are developing a low-power and safe manipulator and have constructed a first proof-of-concept prototype. A patent is pending.
In contrast with conventional factory robots our arm has a low mass and uses low-power motors. This firstly reduces its cost and secondly makes the arm completely safe. The design is based on the principle of static balancing, whereby adjustable springs compensate for the mass of the arm. Another example of this principle at work is found in a classic desk lamp.
Characteristics:
- masses are fully balanced using adjustable springs
- 4 degrees of freedom
- 4 low-power motors
- 4 rotary encoders
- 10 kg total mass
- 2 kg maximum payload
Video:
(right-click this link to download to your computer)