BioMorphic Intelligence Lab @ IROS 2022 in Kyoto
Salua and her team at the MAVLab and the Biomorphic Intelligence Lab were present at this years edition of IROS in Kyoto, Japan. In total the team presented five contributions. One of the highlights of the conference was the best paper award for “Optimal Sensor Launching with UAVs for Monitoring of Hazardous Environments” at the “IROS 2022 Workshop on Robotics for nuclear environments exploration and decommissioning: challenges and emerging techniques”. For the full list of publications please see below.


List of Publications
- Trajectory Optimization and Following for a Three Degrees of Freedom Overactuated Floating Platform
- End-Effector Contact Force Estimation for Aerial Manipulators
- Optimal Sensor Launching with UAVs for Monitoring of Hazardous Environments
- Automated Aerial Screwing with a Fully Actuated Aerial Manipulator
- Battle the Wind: Improving Flight Stability of a Flapping Wing Micro Air Vehicle Under Wind Disturbance With Onboard Thermistor-Based Airflow Sensing
Trajectory Optimization and Following for a Three Degrees of Freedom Overactuated Floating Platform
Anton Bredenbeck, Shubham Vyas, Martin Zwick, Dorit Borrmann, Miguel Olivares-Mendez, Andreas Nüchter
In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022)
Digest: Robots in space are trying to help humans to fulfil tasks such as cleaning, repairing, etc. In this work we developed a controller for an air-bearing-based platform that simulates targets for such robots in space on a flat floor.
Abstract: Space robotics applications, such as Active Space Debris Removal (ASDR), require representative testing before launch. A commonly used approach to emulate the microgravity environment in space is air-bearing based platforms on flat-floors, such as the European Space Agency's Orbital Robotics and GNC Lab (ORGL). This work proposes a control architecture for a floating platform at the ORGL, equipped with eight solenoid-valve-based thrusters and one reaction wheel. The control architecture consists of two main components: a trajectory planner that finds optimal trajectories connecting two states and a trajectory follower that follows any physically feasible trajectory. The controller is first evaluated within an introduced simulation, achieving a 100 % success rate at finding and following trajectories to the origin within a Monte-Carlo test. Individual trajectories are also successfully followed by the physical system. In this work, we showcase the ability of the controller to reject disturbances and follow a straight-line trajectory within tens of centimeters.

End-Effector Contact Force Estimation for Aerial Manipulators
Anton Bredenbeck, Cosimo Della Santina, Salua Hamaza
IROS 2022 Workshop on Mobile Manipulation and Embodied Intelligence (MOMA): Challenges and Opportunities
Digest: Manipulators should be capable of adjusting the strength with which they interact with the environment in order to safely be employed. In this work, as a first step, we showcase an approach to estimate the contact force without measuring it directly and relying only on conventional state measurements.
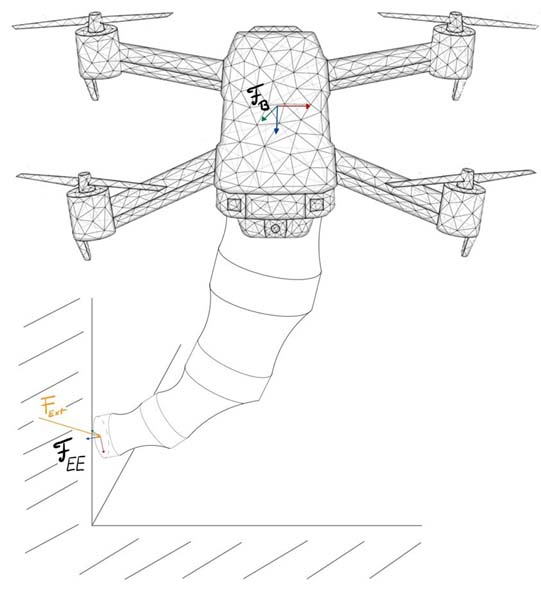
Abstract: Unmanned Aerial Vehicles (UAVs) are widely used for environmental surveying and exploration thanks to their maneuverability and accessibility. Until recently, however, these platforms were mainly used as passive systems that observe their environments visually and do not interact physically. The capability of UAVs to physically interact with their environment, also known as Aerial Manipulators (AMs), allows them to do a wider variety of tasks. These tasks include contact inspection, manipulation of objects, and more. To successfully interact with the environment, the AM must compensate for the contact-induced disturbance forces. One approach is to estimate the contact force and compensate for it within the control approach. This work introduces a framework to estimate the contact force at the End-Effector (EE) using only state measurements of the generic AM. Further, the evaluation of the framework in a simulation of an AM with a tendon-driven robotic arm shows that it precisely estimates the contact force.
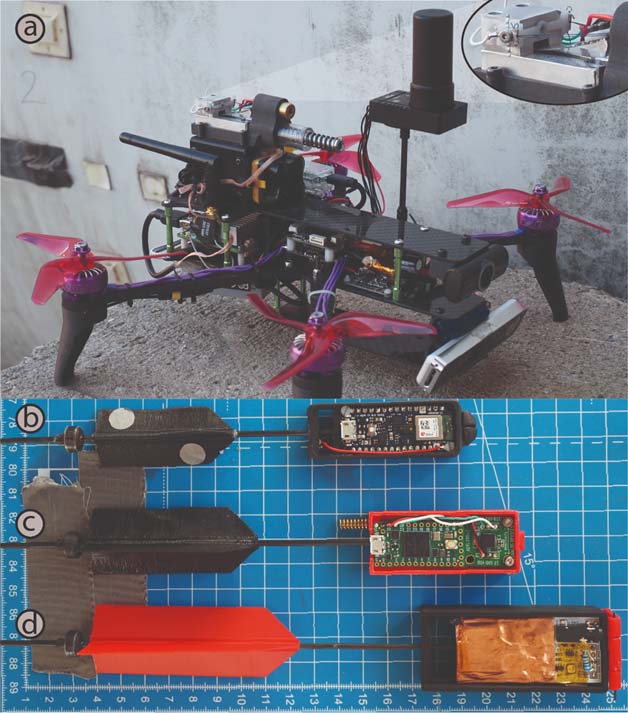
Optimal Sensor Launching with UAVs for Monitoring of Hazardous Environments
Andre Farinha, Salua Hamaza, Guy Burroughes and Mirko Kovac
IROS 2022 Workshop on Robotics for nuclear environments exploration and decommissioning: challenges and emerging techniques
Digest: Hazardous environments such as nuclear plants cannot be easily accessed by humans to conduct routine inspections. In such environments there is often the requirement to monitor the air quality by measuring humidity and pollutants that are harmful for living organisms. In this work we propose an optimal control approach to sensory payload launching on drones, which uses minimal on-board computation and achieves high repeatable outcomes.
Abstract: Sensor launching is an approach to remote sensor placement which can accurately deploy sensor nodes while maintaining a safe distance from obstacles, making it a promising method for hazardous environments such as nuclear facilities. Moreover, as long as the sensor's trajectory can be accurately predicted, up to +/- 5 cm precision can be achieved with little on-board computation and perception. This extended abstract covers a robust method to predict said trajectories and the formulation of an optimal problem to find effective initial launching poses.
Automated Aerial Screwing with a Fully Actuated Aerial Manipulator
Micha Schuster, David Bernstein, Paul Reck, Salua Hamaza and Michael Beitelschmidt
In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022)
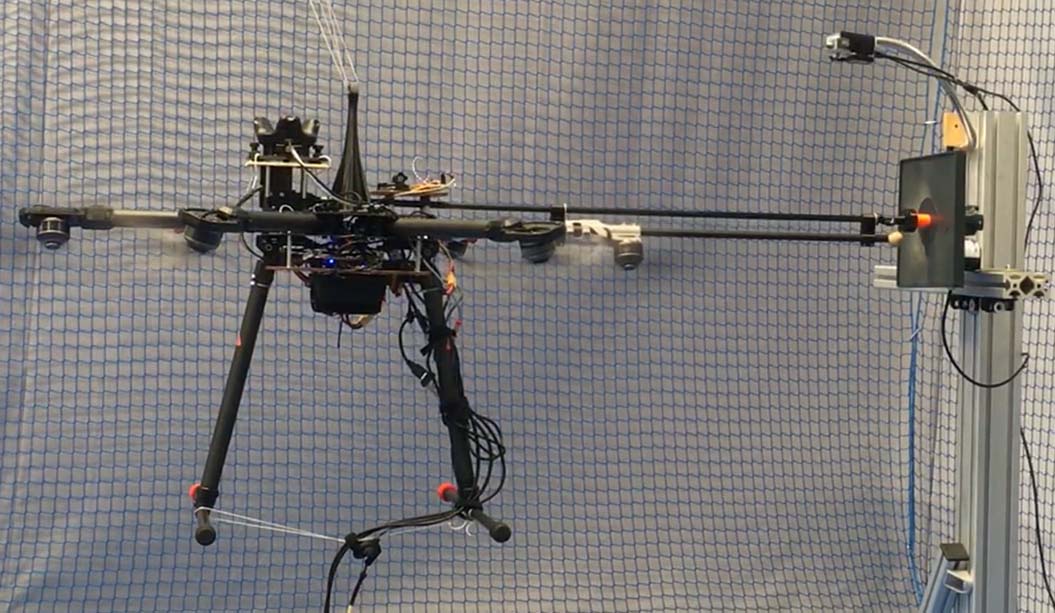
Digest: Drilling at height is still an unresolved challenge for robots due to the highly dynamic nature of the task. In this work, we present the first step in this direction where we deploy a drone with a bespoke manipulator to insert and tighten a screw inside a pre-drilled hole. The peg-in-hole and screwing task are completely autonomous, as we decompose the task in several sub-tasks and use tactile feedback to proceed sequentially from one to the other, via a finite state machine.
Abstract:The tasks that unmanned aerial vehicles (UAVs) have taken upon have progressively grown in complexity over the years, alongside with the level of autonomy with which they are carried out. In this work, we present an example of aerial screwing operations with a fully-actuated tilt-rotor platform. Key contributions include a new control framework to automate screwing operations through a robust hole search and in-hole detection algorithm. These are achieved without a-priori knowledge of the exact hole location, and without the use of external tools, such as vision based hole detection or force sensors. Wrench coupling is implemented to account for the platform's kinematic constraints during screwing. The application of a constant contact force and a compliant response to induced disturbances are obtained with the use of admittance control. The full framework is validated with extensive ight experiments that demonstrate the effectiveness of each subsystem, as well as the complete architecture. We also validate the robustness of the detection algorithm against false positives. Within the results we demonstrate the ability to perform the automated task with a 86% success rate over 35 ights, and measured hole search time of 9s (median value).
Battle the Wind: Improving Flight Stability of a Flapping Wing Micro Air Vehicle Under Wind Disturbance With Onboard Thermistor-Based Airflow Sensing
Sunyi Wang, Diana Olejnik, Christophe de Wagter, Bas van Oudheusden, Guido de Croon, Salua Hamaza
In IEEE Robotics and Automation Letters
In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022)
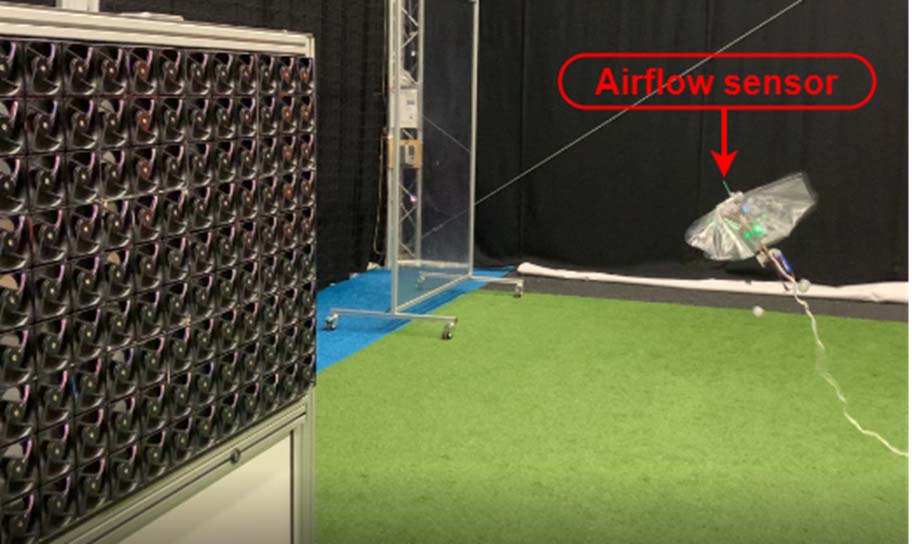
Digest: Animal flyers use embodied airflow sensing to better stabilise in flight. In the world of lightweight flapping wing drones, little effort has been put into trying to improve flight capability in wind conditions. In this work, we create a miniature airflow sensor and integrate it on the 28.2 grams insect-inspired Delfly Nimble to measure airflow in real-time. We then use this information in a gain-scheduling controller to improve position accuracy in wind conditions of such lightweight and delicate flapping wing robot.
Abstract: Flyers in nature equip different airflow sensing mechanisms to navigate through wind disturbances with remarkable flight stability. Embracing bio-inspiration, airflow sensing with conventional sensors has long been utilized in flight control for larger micro air vehicles (MAVs). Bio-inspired flapping wing MAVs (FWMAVs) have extremely limited power and payload, therefore implementing onboard airflow sensing has remained a challenge in spite of various attempts at miniaturized airflow sensor designs. This work characterizes the measurement performance of a lightweight off-the-shelf thermistor-based airflow sensor through comparison with a hot-wire probe. Wind tunnel tethered flight tests on a 31.3-gram FWMAV Delfly Nimble examine the onboard sensing performance at low flow speeds (up to 2 m/s), under the influence of flapping motion. This performance characterization further motivates a miniaturized re-design of the airflow sensor with over 40% size and weight reduction. The redesigned airflow sensor helps to realize the first flapping wing MAV free flight with onboard airspeed measurements, providing remarkable flight stability under wind speeds in the range of approximately 0.5 to 1.2 m/s. This embodied sensing configuration pushes the weight and power limit of miniaturized electronics for FWMAVs, providing an easy-to-integrate solution with good performance, and paving the way for more complex control of FWMAVs in dynamic conditions.