Action-at-a-distance metamaterials may one day be used in wearable soft robotics
A group of materials scientists led by professor Amir Zadpoor have introduced the concept of “action-at-a-distance” metamaterials where a specific pattern of local actuation is programmed into the geometrical design of soft cellular materials. One single force could then be used to create the required local actuation. This kind of local actuation has many potential applications including in soft robotics. The researchers published their findings in the scientific journal APL Materials on 6 March 2018.
Honeycomb and bow-tie
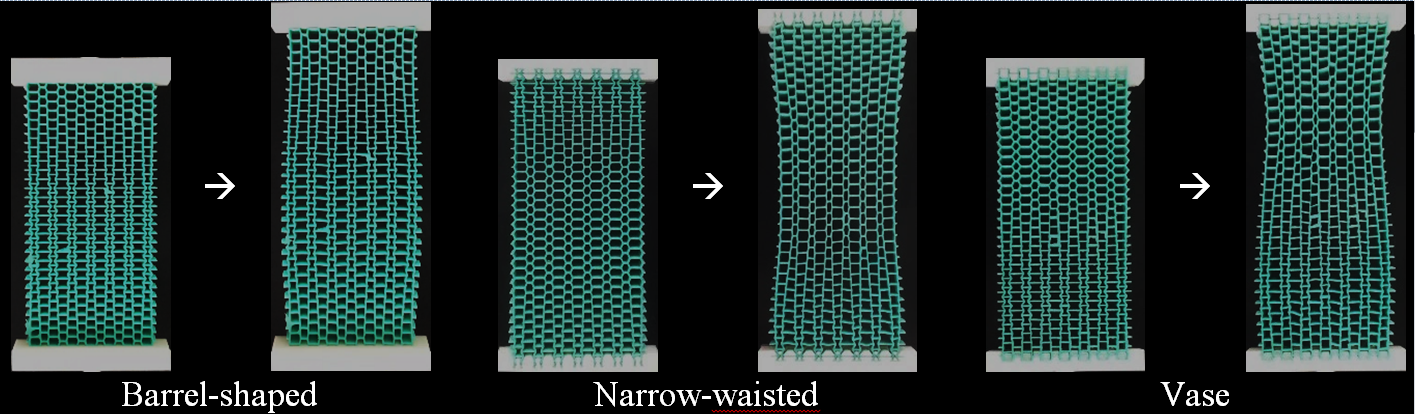
These researchers have shown how simple combinations of honeycomb (positive Poisson’s ratio) and bow-tie (negative Poisson’s ratio) cellular structures may be used to create soft actuators with complex actuation patterns. One single force applied at large distances from the actuators is the only thing that is needed for activating the actuators, hence, the name “action-at-a-distance”.
“It is a remarkable property of these metamaterials that they create very complex actuation patterns with only one actuation force. These materials are also easy to fabricate, as a low-cost 3D printer and a two-component elastomer is all you need to make these cellular structures”, says Zadpoor.
Dr. Reza Hedayati, one of the researchers involved in the study, explains that local actuation usually requires a network of inter-connected actuators that are wired together and are controlled externally to create the required activation pattern. “In our material, the actuation pattern is programmed into the geometry of the cellular structures. There is therefore no need for a network of local actuators and their associated wiring and controllers. This makes these actuators much cheaper and easier to make”.
“The basic principle in our geometrical designs is to gradually change the number of honeycomb and bow-tie cells throughout the cellular structure to create a specific actuation pattern. These cellular structures are sometimes called graded structures because of this gradual change”, says Dr. Mirzaali another member of the research group. The gradual change may be designed to be linear, radial, checker-board like, or striped. The actuation pattern will be different depending on the type of this gradual change.

Soft robotics
Soft robotic is an emerging filed that has attracted much attention during recent years. An important challenge in soft robotic is creating complex actuation patterns, for example, to help a patient move more easily (exosuits) or to grasp a delicate object such as human tissue (robot-assisted surgery). The “action-at-a-distance” metamaterials developed by TU Delft researchers could enable fabrication of such actuators in an easy, time-efficient, and inexpensive way.
“Perhaps a more important aspect of this research is proposing a new design paradigm for soft actuators. Instead of using a network of interconnected actuators, you can use the geometry and program the actuation pattern into the fabric of a soft material. This could open up a lot of other opportunities to use geometry for actuation”, says Zadpoor.
“The other advantage of these geometrical designs is that the resulting actuators are lightweight and unwired and could be easily worn”, adds Hedayati, “This could be the basis for wearable soft robotics such as soft exosuits that would help patients with limited mobility”.
Read the publication ‘Action-at-a-distance metamaterials: Distributed local actuation through far-field global forces’