Dynamic fleet management for autonomous mobility-on-demand system
Problem Domain
The upcoming autonomous vehicle (AV) revolution is expected to re-shape urban transportation in the next decades. The current personal mobility paradigm, mainly based on vehicle ownership, is likely to be phased out as autonomous mobility-on-demand (AMoD) systems develop. All major car manufacturers have already anticipated this shift, announcing their plans to use AV fleets to provide seamless transportation solutions to travelers rather than selling individual vehicles. Optimally managing these fleets, therefore, becomes a crucial activity to improve operational efficiency and quality of service while minimizing overall costs.
At the core of any fleet management and supply-chain coordination, however, lies a highly challenging optimization problem, namely, the Vehicle Routing Problem (VRP). In broad terms, it deals with the optimal assignment of transportation orders to a fleet of vehicles, and the sequencing of stops for each vehicle that represents the formation of routes. Due to the remarkable amount of logistical contexts a fleet may operate, many VRP variants have been studied in the literature. In this study, we focus on novel VRP variants arising in online transportation systems that employ fleets of autonomous vehicles to realize a variety of transportation tasks.
Goal
Develop efficient methods for the robust management of AV fleets operating in diverse logistical scenarios and servicing heterogeneous transportation demands. This relates to dimensions that embrace the whole spectrum of logistics systems such as defining fleet’s size and mix, vehicle rostering, assignment, dispatching, and repositioning.
Approach
We focus on three research lines, each of which exploring an alternative scenario where fleets of autonomous vehicles are likely to shift today’s transportation solutions.
Research line 1: Integrating People and Freight Transportation using compartmentalized AVs
The growth of online shopping is expected to increase even further the necessity for efficient last-mile delivery services, unveiling new opportunities (e.g., people-freight integration) for mobility providers who want to harness the full potential of their fleets. In this research line, we model and evaluate a people and freight integrated system (PFIT) in which both commodities, (i.e., passengers and parcels), are transported simultaneously by compartmentalized mixed-purpose shared autonomous vehicles (SAVs). We assume passenger compartments are private cabins tailored for human transportation whereas freight compartments can be parcel lockers of different sizes. We consider all possible ride-sharing people and freight integration scenarios, that is, each vehicle is allowed to (1) carry one or more passengers, (2) carry various sized parcels, and (3) carry many passengers and parcels. To assess the performance of such mixed-purpose fleets, we compare them with equivalent single-purpose fleets in which there is no people and freight integration.
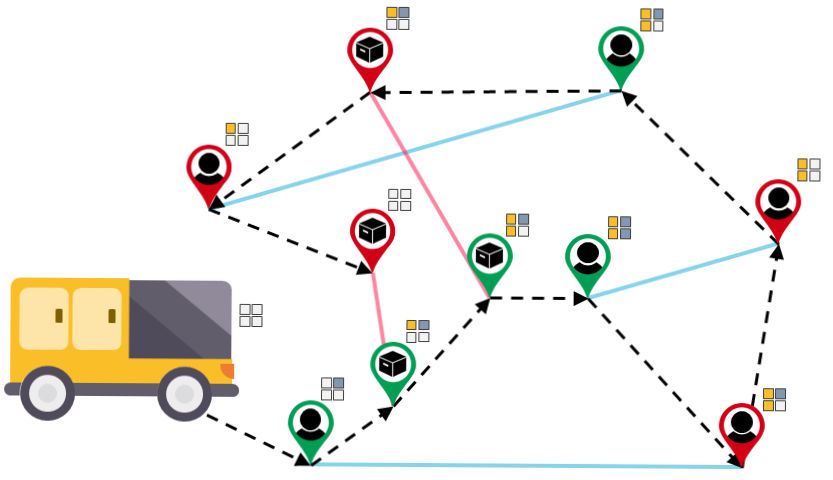
Figure 1: Example of the operational behavior of a people-and-freight integrated system comprised of mixed-purpose capacitated shared autonomous vehicles. Passengers and parcels requests are consolidated in the same vehicle.
Research line 2: Dual-Mode Vehicle Routing in Mixed Autonomous and Non-Autonomous Zone Networks
During a transition phase to full-automation, regulatory barriers will prevent AVs to operate in areas requiring advanced driving capabilities (e.g., shared spaces). Hence, the introduction of AVs is likely to happen gradually, following not only technological advances but also the spread of automation-friendly infrastructures. This research line investigates how the gradual evolution of autonomous infrastructures influences fleet composition as well as vehicle routing in a mobility service. We simulate the spread of automated driving areas in the urban network of Delft, The Netherlands, and analyze the operational performance of a heterogeneous fleet comprised of autonomous vehicles (AVs), conventional vehicles (CVs) and dual-mode vehicles (DVs). Our results let urban planners understand the importance of infrastructural decisions for the quality of local mobility services, and transportation providers gain fundamental insights on how to adjust a fleet to infrastructural conditions of cities.

Figure 2: Potential deployment of automated driving areas in Delft (NL) street network considering different combinations of the number of zones z and coverage percentage p.
Research line 3: A business class for autonomous mobility-on-demand systems
The mobility industry is currently shifting from products to services. With the popularization of mobility-on-demand systems (e.g., Uber) and the rise of autonomous vehicles, even the major car manufacturers are increasingly re-imagining themselves as autonomous mobility-on-demand (AMoD) providers rather than individual vehicle sellers. The success of such providers, however, depends on their ability to create mobility services that challenge traditional mobility products in terms of service quality. Planning models presented in AMoD literature, nonetheless, do not enable active control of service quality, sometimes allowing extensive delays and ultimately service rejection. In this research line, we propose an AMoD solution able to control service quality across a heterogeneous user base on an operational planning level. To this end, we consider an elastic vehicle supply, that is, third-party AVs can be hired on-the-fly on a contract to address excess demand.
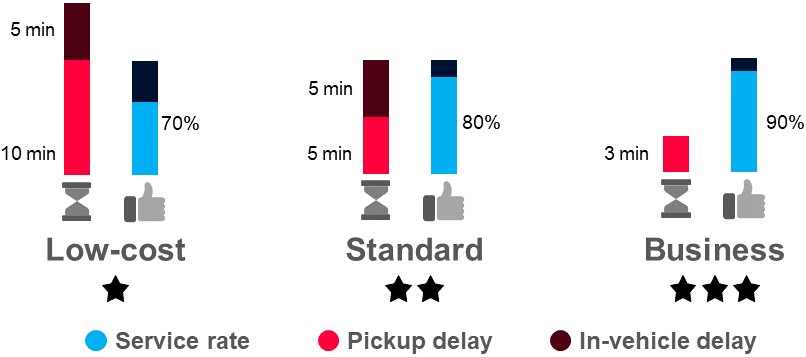
Figure 3: The user base is segmented into three service quality classes, namely, Low-cost, Standard, and Business. Service rates ensure that the AMoD provider is obliged to offer first-tier service levels (i.e., pickup and in-vehicle delays) to a minimum share of users per class. Since we do not allow rejections, users not contemplated with first-tier service levels are required to wait at most twice as long to be picked up.
Results
Beirigo, B., Schulte, F. and Negenborn, R. R., 2018. Dual-Mode Vehicle Routing in Mixed Autonomous and Non-Autonomous Zone Networks. In 2018 21st International Conference on Intelligent Transportation Systems (ITSC) (pp. 1325-1330). IEEE.
Beirigo, B., Schulte, F. and Negenborn, R. R., 2018. Integrating People and Freight Transportation Using Shared Autonomous Vehicles with Compartments. IFAC-PapersOnLine, 51(9), pp.392-397.
Funding
This research is supported by the project “Dynamic Fleet Management (P14-18 – project 3)” (project 14894) of the Netherlands Organization for Scientific Research (NWO), domain Applied and Engineering Sciences (TTW).
Contact
Breno Beirigo (b.alvesbeirigo@tudelft.nl
)
Research team members
MSc Breno Beirigo – TUDELFT/TEL/MTT
Dr. Frederik Schulte – TUDELFT/TEL/MTT
Prof. Rudy Negenborn – TUDELFT/TEL/MTT
Project webpage
Theme
3: Real-time Coordination for Operational Logistics