
Haptic assistance proves excellent solution for working with two robots
Researcher Jeroen van Oosterhout has developed a haptic assistance system that makes it easier to control two robots simultaneously. On Wednesday 1 May, he will be awarded his PhD at TU Delft for his work on the subject.
Slaves
‘Normally, we carry out maintenance and repairs directly by hand. However, sometimes this is impossible because the location is deep undersea (for oil exploration) or contaminated by nuclear radiation (for example, in a future nuclear fusion power plant). In such cases, we use tele-manipulation. This involves an operator controlling a special master robot in order to move a slave robot in the task environment. But the slave robot is limited in terms of the weight it can move. We use a crane to lift components that are too heavy, but for accurate positioning, this still requires the slave robot. We then have a situation in which two asymmetric slaves cooperate,' says Jeroen van Oosterhout.
Haptic Support in tele-manipulation of asymmetric slaves
Nuclear fusion
The operators of systems of this kind must undergo stringent selection and training. ‘Despite this, working with these two systems takes 23 times longer than working directly by hand. This needs to be improved. For example, the success of future nuclear fusion plants will largely depend on how long the plants can remain in operation. A decisive factor in this will be maintenance of the plants and this will need to be done by means of tele-manipulation. This maintenance is complex. This is why I studied the impact of interface design choices and haptic assistance (in which the operator can sense the force being exerted) in order to improve the coordination between two asymmetric slaves, thereby saving time.’
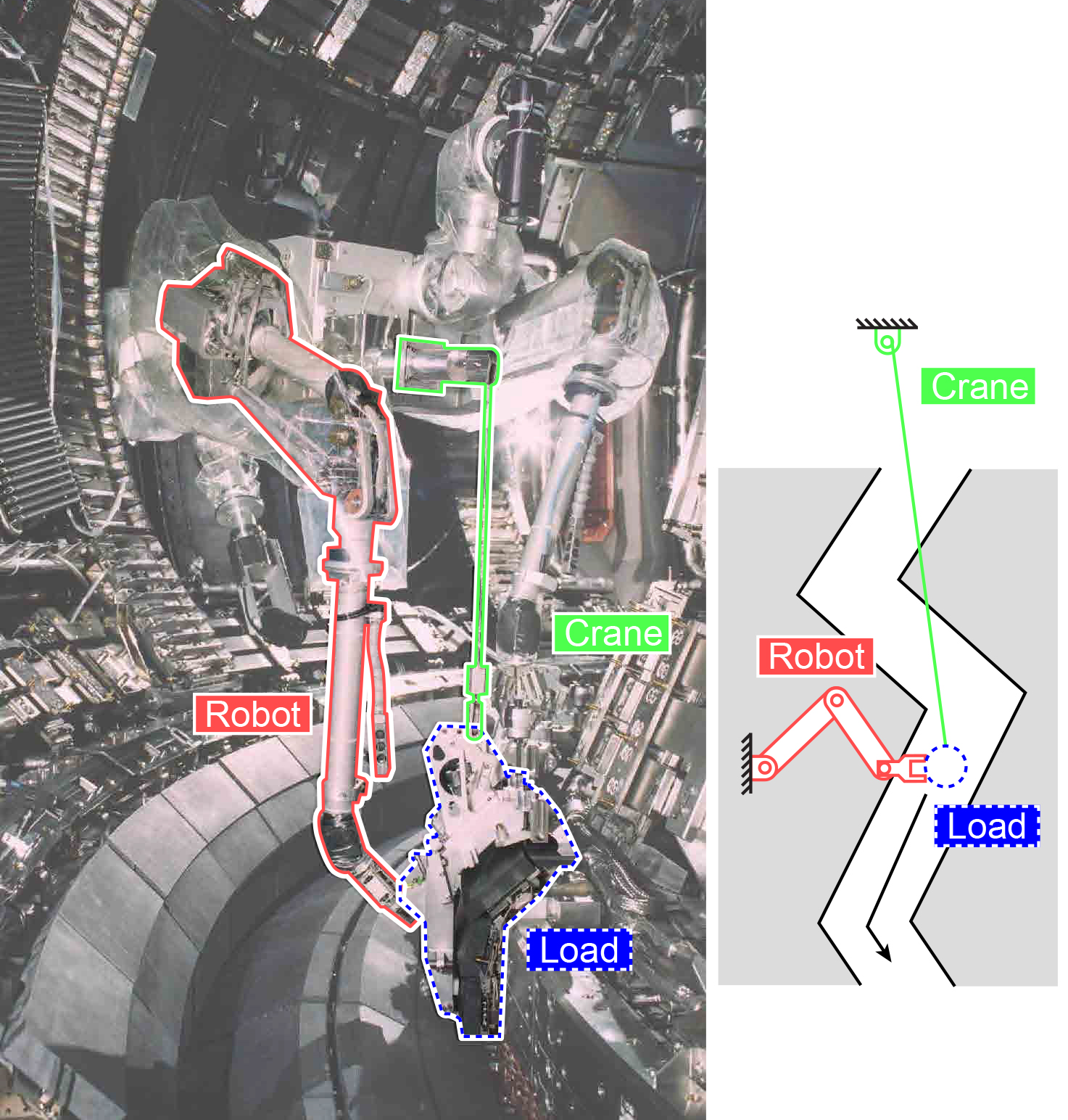
:Left shows a slave robot (in red) and a crane (in green), working together to move a heavy component (blue striped) with millimetre precision in a nuclear fusion plant. The photograph was taken from EUROfusion. Right shows an abstraction of this task.
Variants
For the interface between the operator and the slaves, there are numerous solutions, but only two main variants: two cooperating operators or a single operator. Haptic assistance is known to be able to provide an individual operator with effective support by means of forces on the interface. But in order to coordinate information between the two slaves, van Oosterhout had to design a new haptic assistance controller. This new haptic assistance system helps operators to coordinate two asymmetric telerobots by linking the interfaces haptically via the task definition.
Remarkable
The new haptic assistance has been shown to significantly improve task performance, both with two cooperating operators and with one. ‘Remarkably, two operators without assistance perform significantly better than a single operator, but this difference disappears if haptic assistance is provided in both cases. This means that the haptic assistance makes it possible for a single operator to carry out the asymmetric interactive subtasks as effectively as two operators working together.’
More information
J. van Oosterhout’s PhD conferral ceremony: Co-operation and Haptic Assistance for Tele-manipulated Control over Two Asymmetric Slaves.
Link to dissertation: https://repository.tudelft.nl/islandora/object/uuid%3A50600d87-4a1b-47d5-a26b-2b5ca645ad8b?collection=research
DOI: doi:10.4233/uuid:50600d87-4a1b-47d5-a26b-2b5ca645ad8b
Promotor 1: Prof. D.A. Abbink (3mE); Promotor 2: Prof. F.C.T. van der Helm (3mE); Promotor 3: Prof. M.R. Baar (TU Eindhoven).
on 1 May 2018, at 15:00, Aula Building, TU Delft
From 09.30 to 13.30, before the ceremony, the ‘Mini-symposium on Human-Robot Iteration’ will be held in Committee Room 3 in the Aula Building.