
Never fall again thanks to backpack-like wearable robot
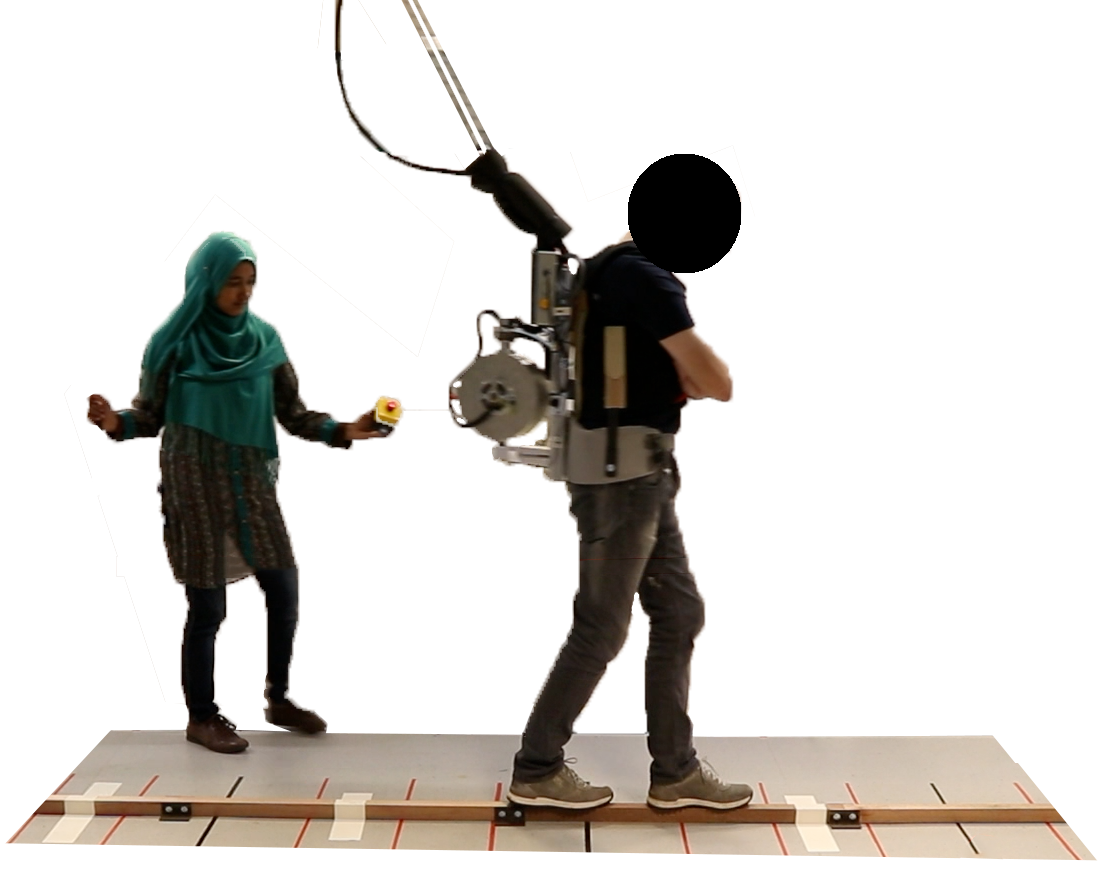
Balance aids currently used in daily life and rehabilitation clinics are helpful but far from perfect. Canes, walkers, crutches, and handrails modify posture and prevent the hands from being used during activities like opening doors, carrying shopping, or answering the telephone. Also more sophisticated tools like mobile bodyweight support systems or robotic gait trainers are bulky or can only be used in specific environments. Andrew Berry, Daniel Lemus and Saher Jabeen, researchers BioMechanical Engineering at TU Delft, led by Professor Heike Vallery, developed a backpack-like wearable robot to provide balance support during rehabilitation; the GyBAR. Fully contained within the backpack is a gyroscopic actuator – a spinning disc repositionable with electric motors – to provide hands-free balance support in multiple activities and environments. The results of the first experiments with human subjects and potential end-users have been published in Nature Scientific Reports.
Read the publication Controller synthesis and clinical exploration of wearable gyroscopic actuators to support human balance
The risk of falling
Falling is the leading cause of accident-related injury among all age groups, but is particularly threatening among sufferers of conditions that affect motor control or result in sensory or cognitive impairment. Adults over the age of 65 are at great risk of serious injury during falling, and, in the event that the hip is fractured, have a 25% chance of dying from their injuries within 6-12 months of the event. To develop a hands-free balance assisting device capable of automatic detection and correction of instability, the field of wearable robotics offers great potential.
Inspiration from space
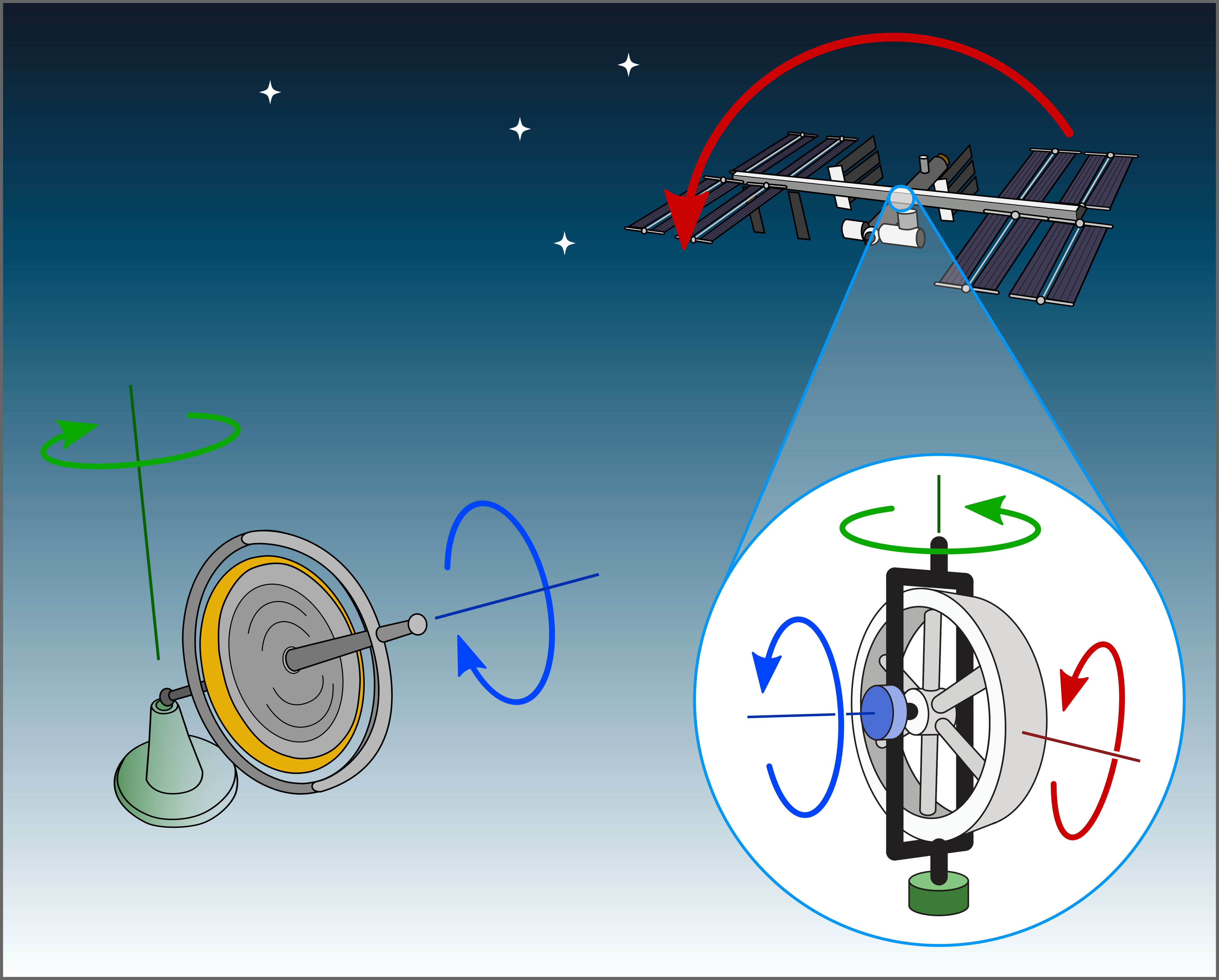
For developing the GyBAR inspiration came from space: satellites are able to change orientation in space without exerting forces or moments against the environment (Figure 1). Moments can be exerted on the spacecraft (or human body) by modifying the angular momentum of internal flywheels, thereby inducing or preventing rotation as desired. One technique to do this exploits a principle called the gyroscopic effect, which can be observed in spinning tops that resist the effect of gravity (Figure 2). Researchers at TU Delft managed to use the gyroscopic effect to construct an actuator, as opposed to its more common use as a sensor (e.g., the gyroscope sensor in your mobile phone to measure motion).
Partners
Researchers Andrew Berry, Daniel Lemus and Saher Jabeen were led by professor Heike Vallery and Frans van der Helm, and developed the GyBAR in cooperation with Westland Orthopedie BV, DEMO (Dienst Elektronische en Mechanische Ontwikkeling), and Hyperion Technologies BV. Clinical assessment of the GyBAR was performed in cooperation with the Max Näder Center for Rehabilitation Technologies and Outcomes Research at the Shirley Ryan AbilityLab in Chicago and with rehabilitation medical specialist Carel Meskers of the VUmc.
- Also read Nature Blog post about the challenges and wider goals of this work.
- More information about the Gyroscopic balance assistance
For more information and questions
- Heike Vallery, professor Human Motor Augmentation, +31 15 278 3517, h.vallery@tudelft.nl
- Dimmy van Ruiten, Communications advisor, 0639844164, d.m.vanruiten@tudelft.nl

Prof. Dr.-Ing. H. Vallery

A. (Andrew) Berry

S. Jabeen
