
Self-Adapting Trail Blaizer
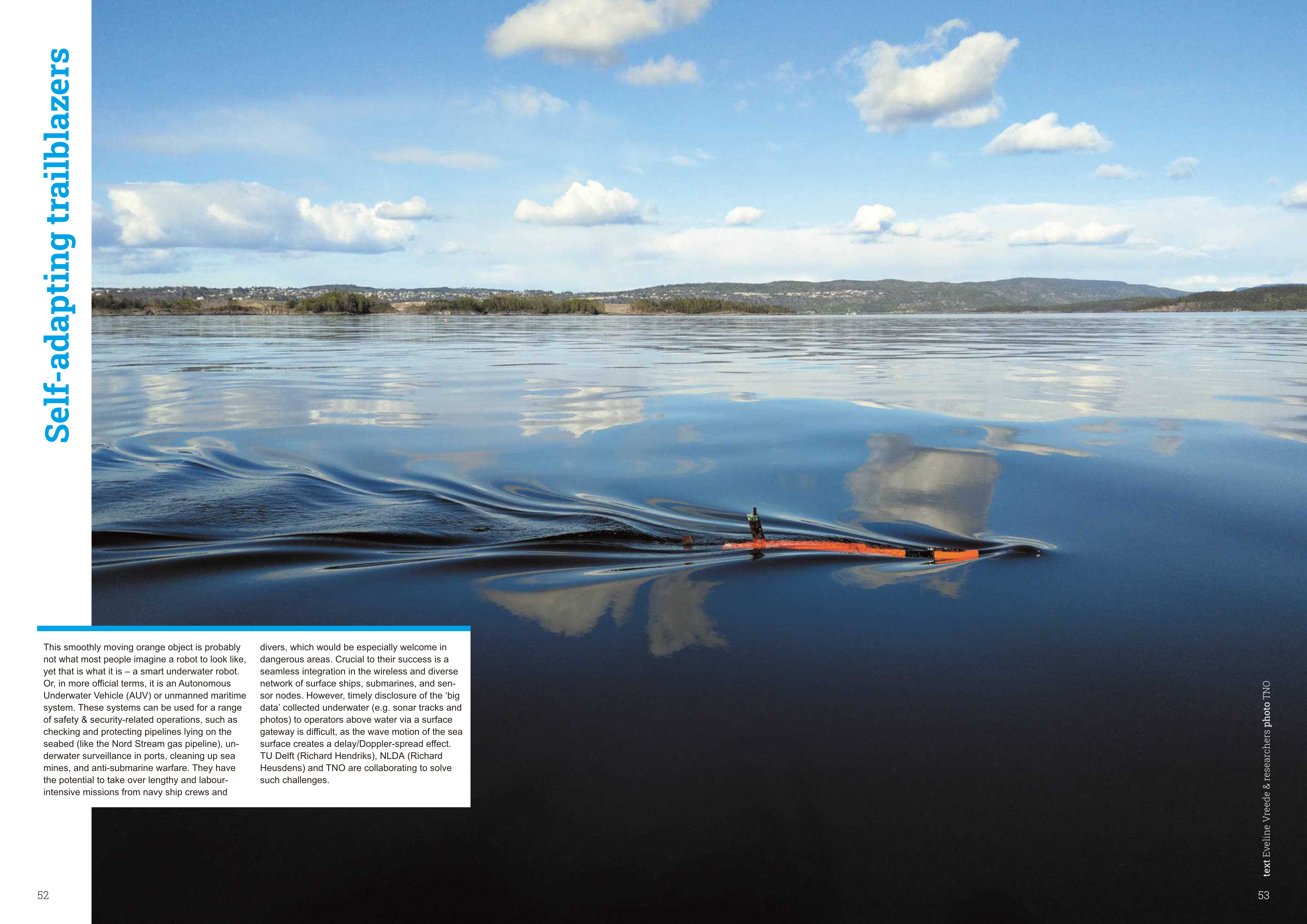
This smoothly moving orange object is probably not what most people imagine a robot to look like, yet that is what it is – a smart underwater robot. Or, in more official terms, it is an Autonomous Underwater Vehicle (AUV) or unmanned maritime system. These systems can be used for a range of safety and security-related operations, such as checking and protecting pipelines lying on the seabed (like the Nord Stream gas pipeline), underwater surveillance in ports, cleaning up sea mines, and anti-submarine warfare. They have the potential to take over lengthy and labour-intensive missions from navy ship crews and divers, which would be especially welcome in dangerous areas. Crucial to their success is a seamless integration in the wireless and diverse network of surface ships, submarines, and sensor nodes. However, timely disclosure of the ‘big data’ collected underwater (e.g., sonar tracks and photos) to operators above water via a surface gateway is difficult, as the wave motion of the sea surface creates a delay/Doppler-spread effect. TU Delft (Richard Hendriks), NLDA (Richard Heusdens) and TNO are collaborating to solve such challenges.
Richard Hendriks is associate professor in the Signal Processing Systems group of the Faculty of Electrical Engineering, Mathematics and Computer Science.