
Vacuum Grasper
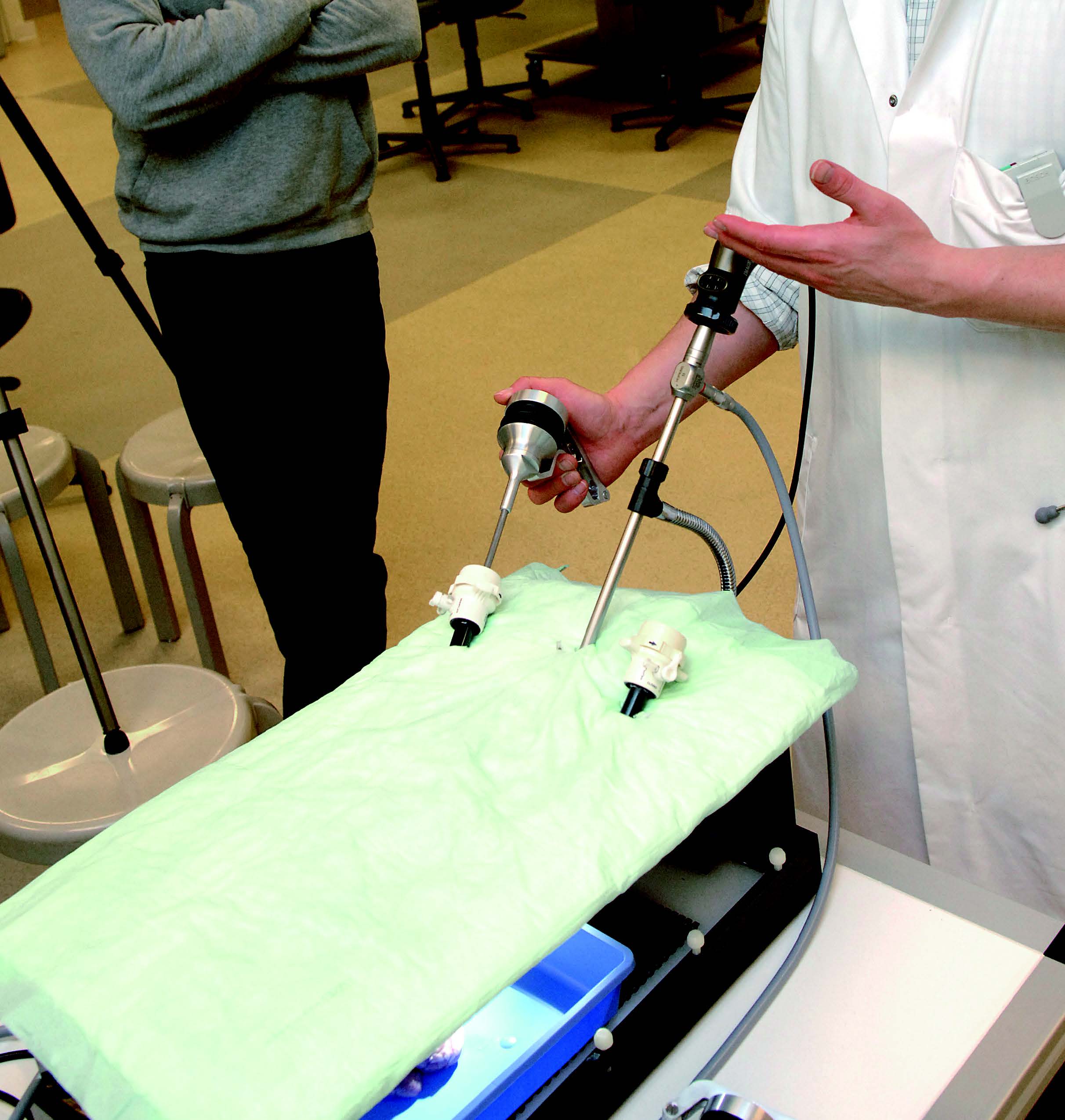
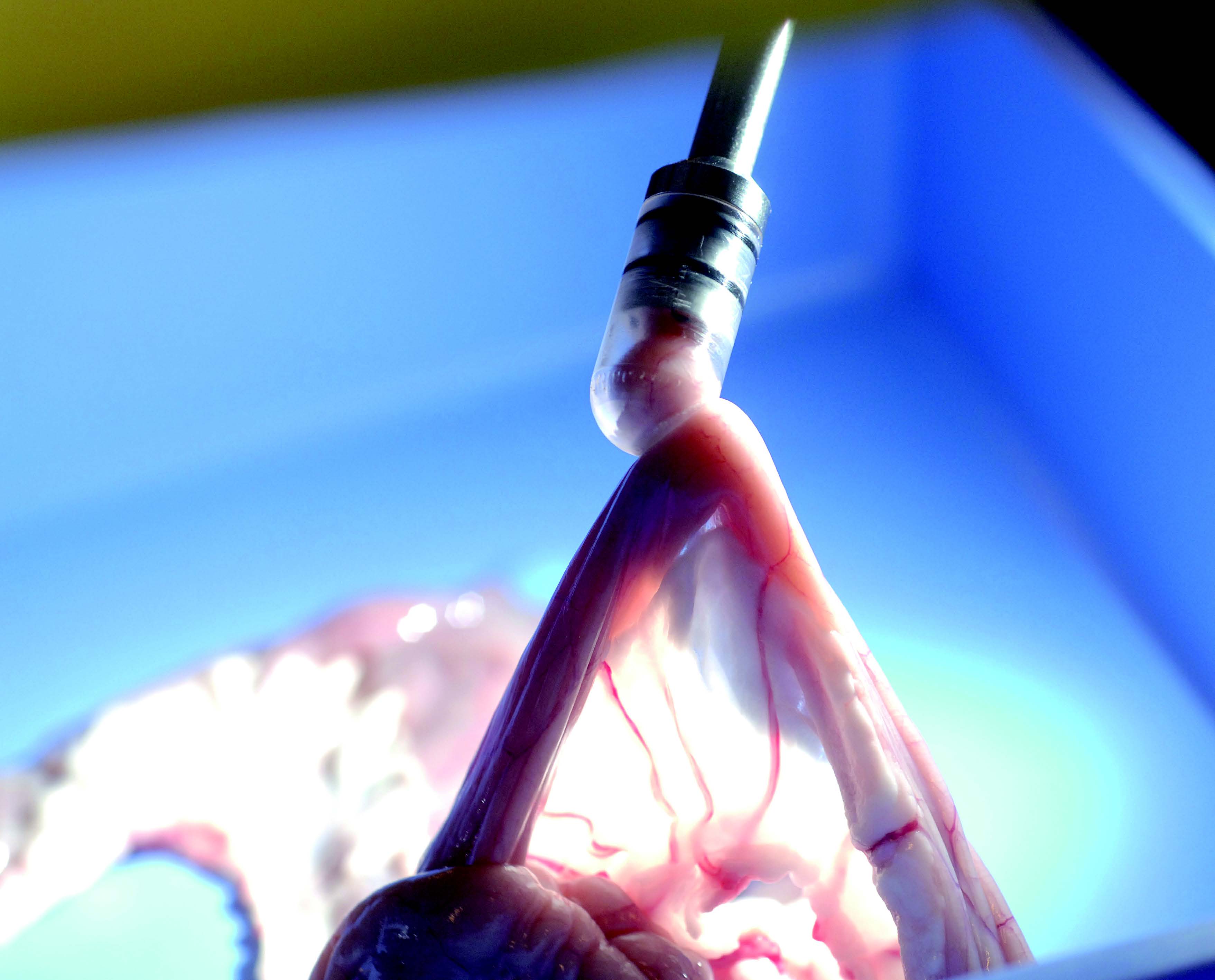
Laparoscopic surgery is abdominal surgery conducted through small incisions. This technique requires specially designed instruments to safely manipulate the soft organs. This is particularly true for the bowels since bowel damage is very dangerous.
Goals of the project
This project investigates the potential of vacuum technique as a manipulation and stabilization technique for laparoscopic surgery. A laparoscopic vacuum grasper was developed and successfully tested byseveral expert surgeons. The tests showed that, even without extra training of surgeons, the instrument can be safely used on the bowel. The instrument is now scheduled for clinical trials. A second instrument was developed for positioning and stabilizing the bowel. A first functional model was manufactured and tested successfully. A followup prototype is currently being manufactured for in-vivo tests. In conclusion, the project has shown that vacuum technique is a safe grasping technique to manipulate the bowels.

Richard Goossens
- +31 (0)15 27 86340
- R.H.M.Goossens@tudelft.nl
-
Room C-3-140
"In the end there is a solution for everything."
Researchers
- Prof.dr.ir.Richard Goossens
- Prof.dr. Jack Jakimowicz
- Durandus Vonck
Partners
- Karl Storz GmbH