Topometric Maps of Indoor Environments
The merging of multiple partial maps of indoor environments created by teams of human or robot agents into a single global map is a key problem
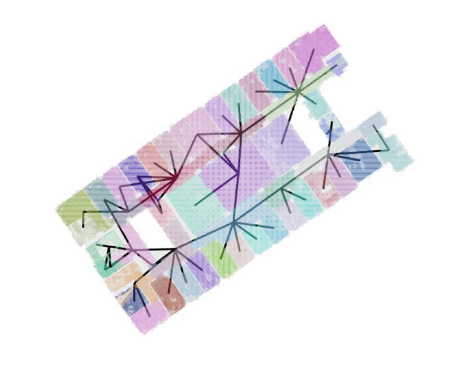
that, when solved, can improve mapping speed and quality. Existing map merging approaches generally depend on external signals which are not available indoors or only use the geometric properties of an environment. Inspired by the human understanding of environments in relationship to their context we propose a map merging system that extracts and uses topometric maps, a map representation containing both the geometric and topological characteristics of an environments, to solve the map merging problem in indoor spaces. In this research we demonstrate an intuitive approach to extracting topometric maps of 3D, multi-floor, indoor environments and use both the topological and geometric characteristics contained in the topometric maps to perform context-aware map matching and fusion.
More information
- Master thesis 'Topometric Maps of Indoor Environments'