
Sensing, modelling and structural optimization for soft material robots
Research in soft robotics focuses on the use of soft materials in robotics in order to make them safer and more adaptive. Using these properties, soft robots are capable of delicate tasks such as picking fragile fruits of various sizes without crushing them. Moreover, soft robotic technology is expected to play an important role in moving robots into people’s daily life. Think about robots that assist in elderly care, soft orthoses, and intelligent soft robotic products such as seats and matrasses.

Goals of the project
With the increase in robot flexibility, new questions arise on how to control such robots. Traditional rigid robots have a limited amount of Degrees Of Freedom (DOF) and each DOF has its own actuator and encoder to control and measure its deformation. In contrast, soft robots have almost infinite degrees of freedom, and only a very limited number of actuators. Existing sensors lack softness and usually only capture a single DOF.
Our group approaches this problem from three directions:
- Through structural design optimization of soft robots to reduce undesired DOF,
- through the modelling of soft body behaviour under actuation and
- through the development of soft sensing methods that are able to capture and deal with a high amount of DOF.
Structural design optimization
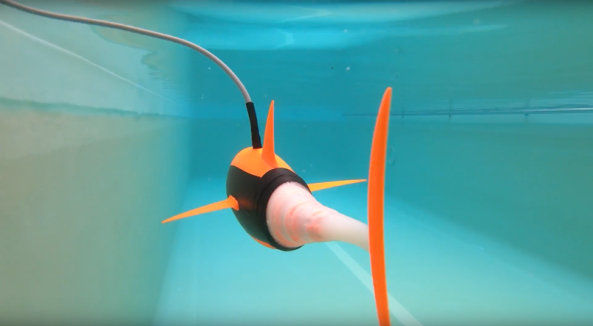
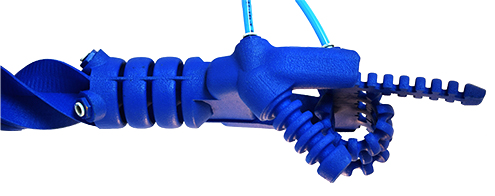
This part of the research focuses on how the behaviour of soft robots can be embedded throughout their design. Research on a 3D-printed soft robotic hand showed how the shape of the air chambers inside the fingers can be modified to realize different behaviours [1]. Later research focused on reducing out-of-plane deformation of soft pneumatic fingers through structural optimization [2]. Related research focuses on design optimization of a high-speed and efficient swimming soft robotic fish inspired by thunniform swimming.
Modelling and Kinematics control
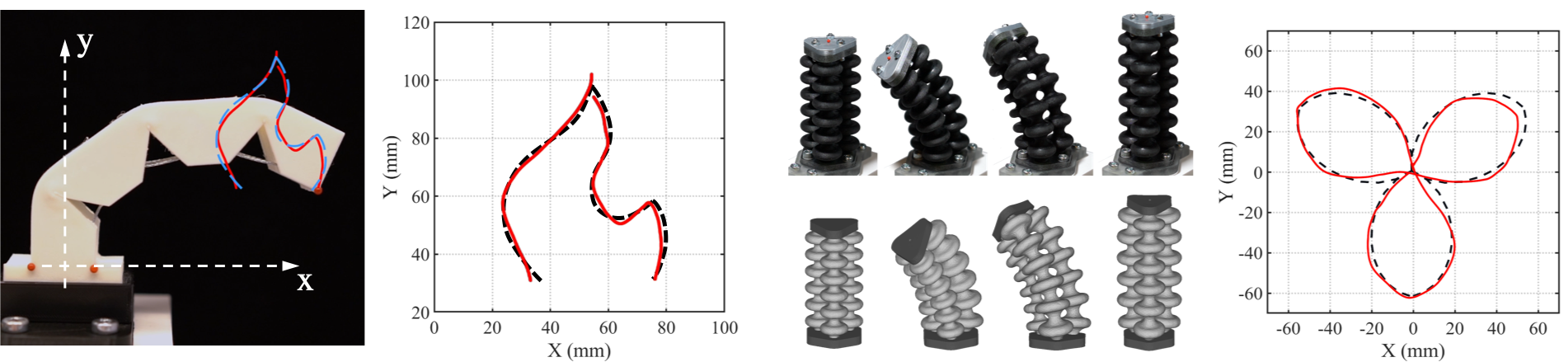
Kinematics link the actuation and the motion of a robotic system. This link is a fundamental requirement for realizing precise control in robots. Whereas it is well-known how to solve the kinematics problem for robots with rigid bodies, the high amount of DOF in soft robots make it almost impossible to define the link between their actuation and motion. We tackled this issue by developing an efficient and widely applicable geometry-based simulation framework that can predict the behaviour of multi-material soft robots for different types of actuation [3]. Our modelling method can be applied to address important challenges in the field of soft robotics, such as soft robot trajectory planning and precise grasping [4]. Hereby, the work is an important step towards industrial application of soft robots.
Soft sensing methods
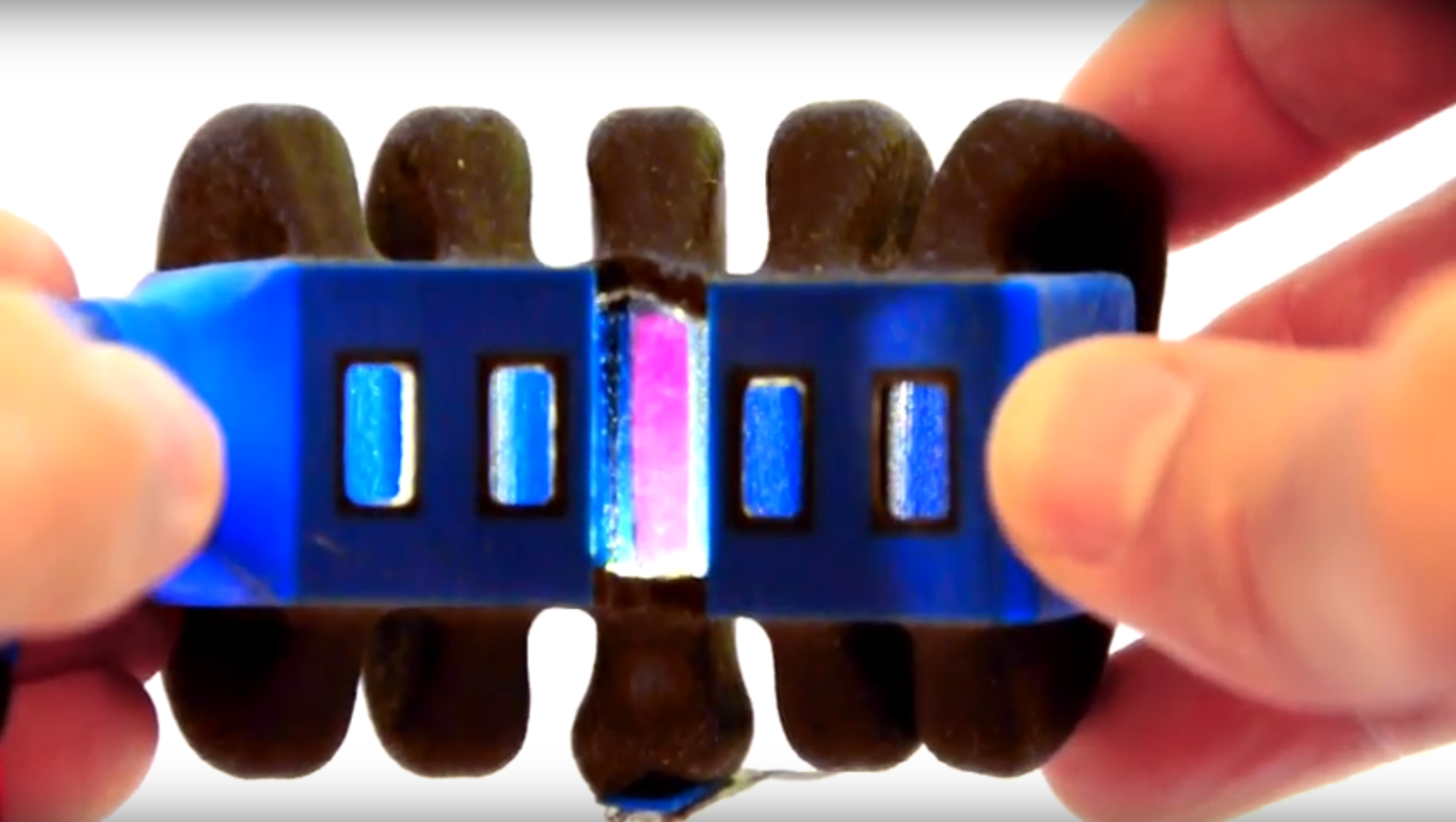
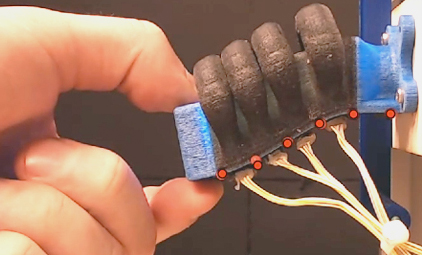
Accurate shape sensing of soft pneumatic bending actuators was achieved by embedding colour-change generating patterns inside the air chambers of a soft robot [5]. These changes in colour are being measured by small optical sensors on the inextensible layer of the actuator. After a neural network-based calibration method, the shape of the actuator can be accurately predicted on the basis of these sensor values [6].
Publications
[1] Rob Scharff, Zjenja Doubrovski, Wim Poelman, Pieter Jonker and Charlie Wang: Towards behavior design of a soft robotic hand, Soft Robotics: Trends, Applications and Challenges, 23-29, 2017
[2] Rob Scharff, Rens Doornbusch, Alexander Klootwijk, Ajinkya Doshi, Zjenja Doubrovski, Jun Wu, Jo Geraedts and Charlie Wang: Color-based sensing of bending deformation on soft robots, 2018 IEEE International Conference on Robotics and Automation (ICRA), 1-7, 2018
[3] Guoxin Fang, Cristopher-Denny Matte, Tsz-Ho Kwok and Charlie Wang: Geometry-based direct simulation for multi-material soft robots, 2018 IEEE International Conference on Robotics and Automation (ICRA), 1-6, 2018
[4] Guoxin Fang, Rob Scharff and Charlie Wang: Controlling multi-segment soft robot for grasping: an approach based on geometric computing, 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), short paper, 2019
[5] Rob Scharff, Rens Doornbusch, Zjenja Doubrovski, Jun Wu, Jo Geraedts and Charlie Wang: Color-based proprioception of soft actuators interacting with objects, IEEE/ASME Transactions on Mechatronics, 2019
[6] Rob Scharff, Jun Wu, Jo Geraedts and Charlie Wang: Reducing out-of-plane deformation of soft robotic actuators for stable grasping, 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), 265-270, 2019

Researchers
- Prof.dr. Charlie Wang
- Prof.dr. Peter Vink
- Dr.ir. Jun Wu
- Dr.ir. Zjenja Doubrovski
- Rob Scharff, MSc
- Alice Buso, MSc
- Guoxin Fang, BSc
- Em.prof.dr.ir. Jo Geraedts
- Em.prof.dr.ing. Wim Poelman
- Em.prof.dr.ir. Pieter Jonker