
Een robot met een zachte aanraking
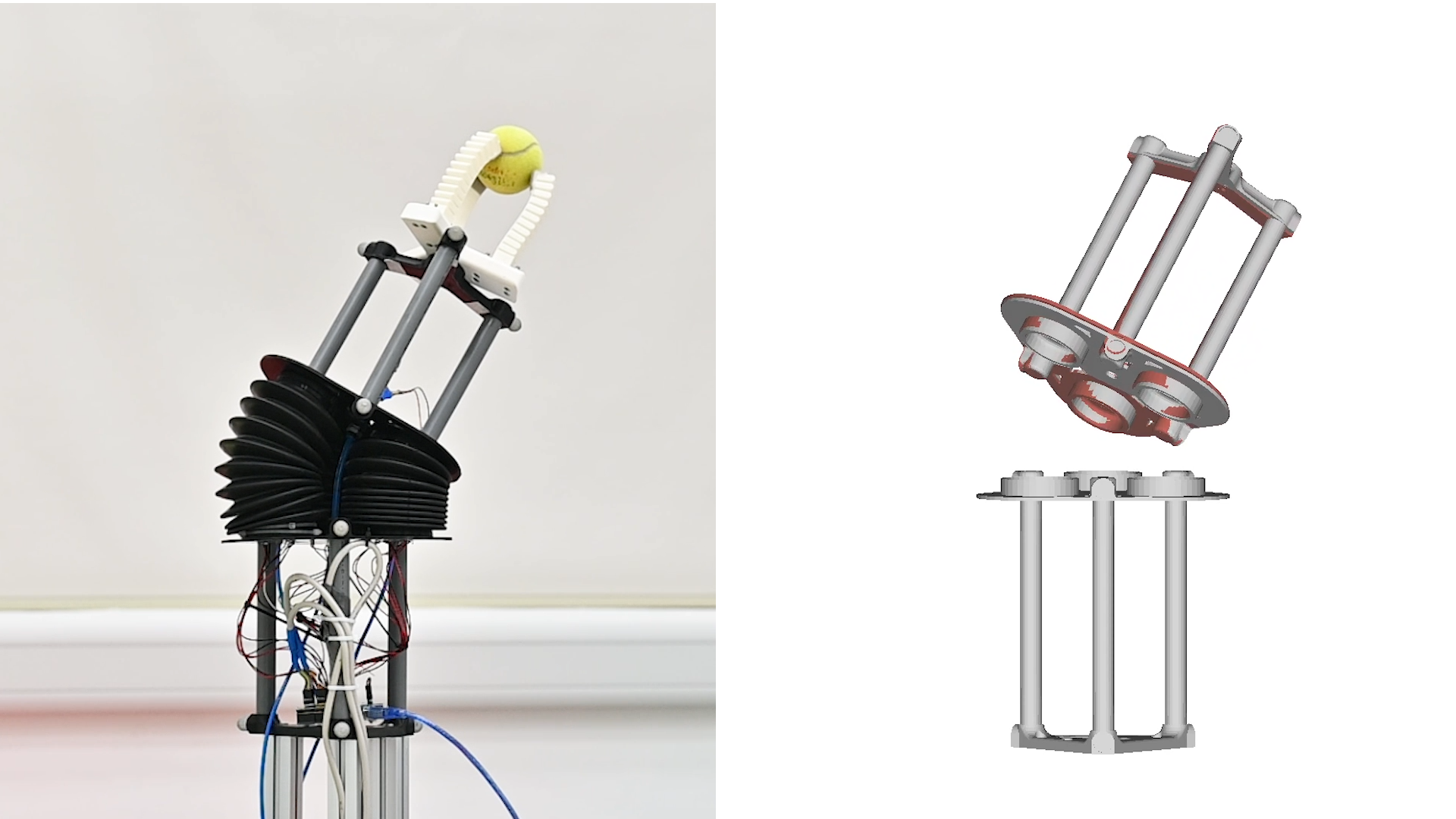
Stel je een robothand voor. Nu denk je misschien aan metalen vingers met stijve gewrichten. Maar stel je nu eens voor die gemaakt is van zachte materialen en behendig een appel kan vastpakken, zich automatisch kan aanpassen aan de vorm van de appel en hem uit een boom kan plukken. Rob Scharff onderzocht in zijn promotieonderzoek hoe het opkomende gebied van de zachte robotica een revolutie teweeg kan brengen in de toekomst van de manipulatie door robots.
Jump-start
Het startpunt voor Scharffs onderzoek kwam eigenlijk al voordat hij aan zijn PhD-traject begon. Zijn afstudeerproject, waarin hij onderzoek deed naar het 3D-printen van zachte robots, resulteerde in het printen van een zachte robothand.
Het toonde het potentieel aan voor interactie met zachte robots, waarbij de robothand kon 'voelen' hoe hard je erin zou knijpen en dan terugknijpen.
"Maar er waren nog zoveel tekortkomingen," zegt Scharff. "De echte detectie van de lichaamspositie ontbrak nog en dat was de eerste stap om te kijken hoe we dat konden verbeteren."
Lees het onderzoek:
Een zachtere aanpak
Die ervaring hielp de focus te bepalen voor Scharffs promotieonderzoek. Hij richtte zich op de uitdaging van proprioceptie, oftewel manipulatoren een gevoel geven van zelfbewegingen en lichaamspositie. Bij starre robots heb je starre gewrichten, dus is het makkelijker om de rotatie van elk gewricht te meten en de exacte positie te kennen. "Maar je kunt je voorstellen dat als je zachte robots hebt die zich naar een object voegen, je in feite vrijwel oneindig veel graden van bewegingsvrijheid hebt," zegt hij, "dus hoe ga je dat meten?"

Hoewel bewegingen met stijve machines meten eenvoudiger is, wordt het ingewikkelder als het gaat om het uitvoeren van meer behendige taken. Dat komt omdat veel onderdelen ook veel sensoren en actuatoren die moeten worden aangestuurd betekenen. En dat betekent ook dat elke vinger moet worden geprogrammeerd om de vorm van een voorwerp als een appel aan te voelen en zich daaraan precies aan te passen. Maar met zachte materialen kun je de vingers opblazen, zodat ze zich automatisch aanpassen aan de vorm van die appel. En deze aanpak heeft volgens Scharff het potentieel om zaken sterk te vereenvoudigen.
Geïntegreerd ontwerp
Met behulp van 3D-printen is Scharff begonnen enkele kleurpatronen in de robot te integreren. Vervormingen van de robot vertalen zich dan in een verandering van kleur en met kleine kleursensoren wordt het mogelijk om de vorm van de robot te voorspellen. Maar hij ontdekte dat naast sensoren ook het ontwerp van de robot belangrijk was. Hoe de actuatoren geprint zijn, heeft namelijk grote invloed op de prestaties.
Stijve robots kunnen alleen bewegen waar je ze wilt laten bewegen, legt Scharff uit. Je plaatst alleen een gewricht waar je wilt dat ze roteren. Bij zachte robots geldt dat als je een vinger in een bepaalde richting wilt laten buigen, hij ook in de andere richting zal buigen of zelfs zal draaien. "Eerst moet je aan het ontwerp werken om te zien of je die bewegingen kunt uitsluiten die je niet wilt," zegt hij. "Dus het ene deel is het ontwerp, ervoor zorgen dat je precies de beweging hebt die je wilt en het andere deel is het detecteren van die bewegingen."
De cirkel sluiten
Op dit moment zijn commercieel verkrijgbare zachte robotgrijpers alleen in staat om eenvoudige pick-and-place taken uit te voeren met open-loop controle. Het onderzoek van Scharff helpt dus bij het opbouwen van kennis over nauwkeurige proprioceptie, wat bijdraagt aan de ontwikkeling van geavanceerdere besturingsalgoritmen met een gesloten lus voor zachte robotmanipulatoren. Hoewel het een relatief jonge discipline is, krijgt zachte robotica veel aandacht en Scharff stelt dat er veel potentiële toepassingen zijn, waaronder menselijke robotinteractie, minimaal invasieve chirurgie, land- en tuinbouw.

Goed gepositioneerd
Het vakgebied van de zachte robotica is van nature multidisciplinair, waardoor Delftse ontwerpers volgens Scharff op een unieke manier zijn voorbereid op de uitdaging. "Er is een grote behoefte aan mensen met een geïntegreerde aanpak die kunnen kijken naar productie, detectie en ontwerp en die alles kunnen veranderen. Met starre robots, is het als: Ik werk aan de actuator, jij werkt aan de sensor en dan voegen we het samen. Maar bij soft-robotica moet het echt in overleg ontworpen worden en ik denk dat ik daar met mijn achtergrond een bijdrage aan kan leveren."
Rob Scharff doet momenteel een postdoc in bio-geïnspireerde zachte robotica aan het Instituto Italiano di Tecnologia.



Jun Wu
- +31 (0)15 27 84858
- j.wu-1@tudelft.nl
- Personal webpage
-
Room 32-B-3-030
"Make things as simple as possible, but not simpler." - Albert Einstein